VEX机器人传感器的使用方法是构建智能机器人的重要环节,这些传感器包括编码器和角度传感器,它们在VEX机器人系统中起到关键的感知和控制作用。
编码器光学轴编码器(Optical Shaft Encoder)是一种用于测量旋转速度和位置的传感器。在VEX机器人中,编码器的使用通常涉及以下几个步骤:
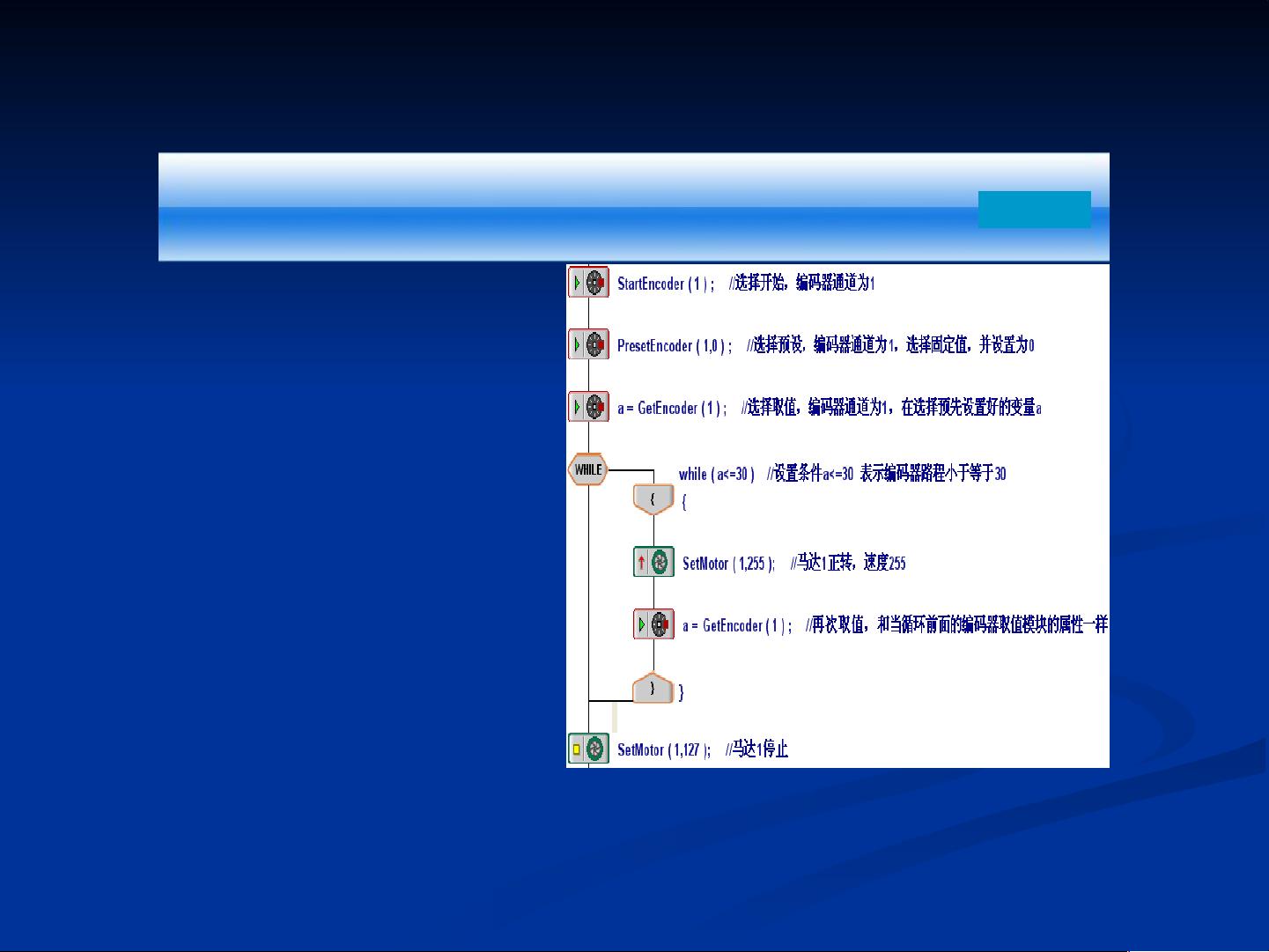
1. 定义变量:需要在变量定义模块中创建一个变量,例如变量`a`,用于存储编码器的读数。
2. 配置编码器:选择编码器连接到主控器的端口,并对其进行初始化,将其值设为0以清零。
3. 反馈值:通过选择取值,将编码器的脉冲反馈给定义的变量。
4. 循环控制:使用当循环模块,基于变量`a`的值来控制马达。例如,当`a<=30`时,马达正转;当`a>30`时,停止马达。这允许机器人根据编码器的读数精确控制马达的移动距离。
角度传感器(Potentiometer Kit)是一种模拟传感器,主要用于测量旋转角度,精度高于伺服电机。它的工作范围大约是260度,适用于需要限定角度旋转的场景。在VEX 2.0中文版中,可以通过光敏传感器、寻线传感器或模拟输入模块进行编程。传感器的数值范围是0到1023,根据实际需要设置角度范围来控制马达的启停。此外,角度传感器具有记忆功能,可以记住上次关闭电源时的位置。
使用角度传感器的程序示例包括:
1. 将传感器连接到模拟端口1,定义一个整型变量`a`。
2. 使用巡线模块配置通道并选择变量`a`。
3. 设置当循环,当`a`小于200时,马达1正转;当`a`大于等于200时,停止马达1。这样,机器人可以根据角度传感器的读数进行相应的动作。
数字输出(Digital Output)模块则用于控制数字设备的状态,如LED灯或电磁阀。你可以设置输出为固定的1或0,或者关联到已定义的变量。默认情况下,所有数字输出值为1。在程序中,你可以用数字输出模块来控制气缸的伸缩,如输出1代表伸出,0代表缩回,结合悬空等待可以控制动作持续时间。
VEX机器人传感器的使用方法涉及到编码器和角度传感器的配置、变量的定义以及控制逻辑的构建。这些传感器和输出模块的组合使得VEX机器人能够在各种任务中实现精确的运动控制和环境感知。通过有效的编程,我们可以使机器人根据接收到的信号执行复杂的操作,提高其智能化水平。