理解图优化,一步步带你看懂g2o框架.pdf
需积分: 44 35 浏览量
2020-04-20
23:14:10
上传
评论
收藏 1.81MB PDF 举报

首发于公众号:计算机视觉life 旗下知识星球「从零开始学习SLAM」
2019.01.17
理解图优化,一步步带你看懂g2o框架
小白:师兄师兄,最近我在看SLAM的优化算法,有种方法叫“图优化”,以前学习算法的时候还有一个优化方法叫“凸
优化”,这两个不是一个东西吧?
师兄:哈哈,这个问题有意思,虽然它们中文发音一样,但是意思差别大着呢!我们来看看英文表达吧,图优化的英
文是 graph optimization 或者 graph-based optimization,你看,它的“图”其实是数据结构中的graph。而凸优化的
英文是 convex optimization,这里的“凸”其实是凸函数的意思,所以单从英文就能区分开它们。
小白:原来是这样,我看SLAM中图优化用的很多啊,我看了一下高博的书,还是迷迷糊糊的,求科普啊师兄
师兄:图优化真的蛮重要的,概念其实不负责,主要是编程稍微有点复杂。。
小白:不能同意更多。。,那个代码看的我一脸懵逼
图优化有什么优势?
师兄:按照惯例,我还是先说说图优化的背景吧。SLAM的后端一般分为两种处理方法,一种是以扩展卡尔曼滤波
(EKF)为代表的滤波方法,一种是以图优化为代表的非线性优化方法。不过,目前SLAM研究的主流热点几乎都是
基于图优化的。
小白:据我所知,滤波方法很早就有了,前人的研究也很深。为什么现在图优化变成了主流了?
师兄:你说的没错。滤波方法尤其是EKF方法,在SLAM发展很长的一段历史中一直占据主导地位,早期的大神们研
究了各种各样的滤波器来改善滤波效果,那会入门SLAM,EKF是必须要掌握的。顺便总结下滤波方法的优缺点:
优点:在当时计算资源受限、待估计量比较简单的情况下,EKF为代表的滤波方法比较有效,经常用在激光SLAM
中。
缺点:它的一个大缺点就是存储量和状态量是平方增长关系,因为存储的是协方差矩阵,因此不适合大型场景。而现
在基于视觉的SLAM方案,路标点(特征点)数据很大,滤波方法根本吃不消,所以此时滤波的方法效率非常低。
小白:原来如此。那图优化在视觉SLAM中效率很高吗?
师兄:这个其实说来话长了。很久很久以前,其实就是不到十年前吧(感觉好像很久),大家还都是用滤波方法,因为
在图优化里,Bundle Adjustment(后面简称BA)起到了核心作用。但是那会SLAM的研究者们发现包含大量特征点
和相机位姿的BA计算量其实很大,根本没办法实时。
小白:啊?后来发生了什么?(认真听故事ing)
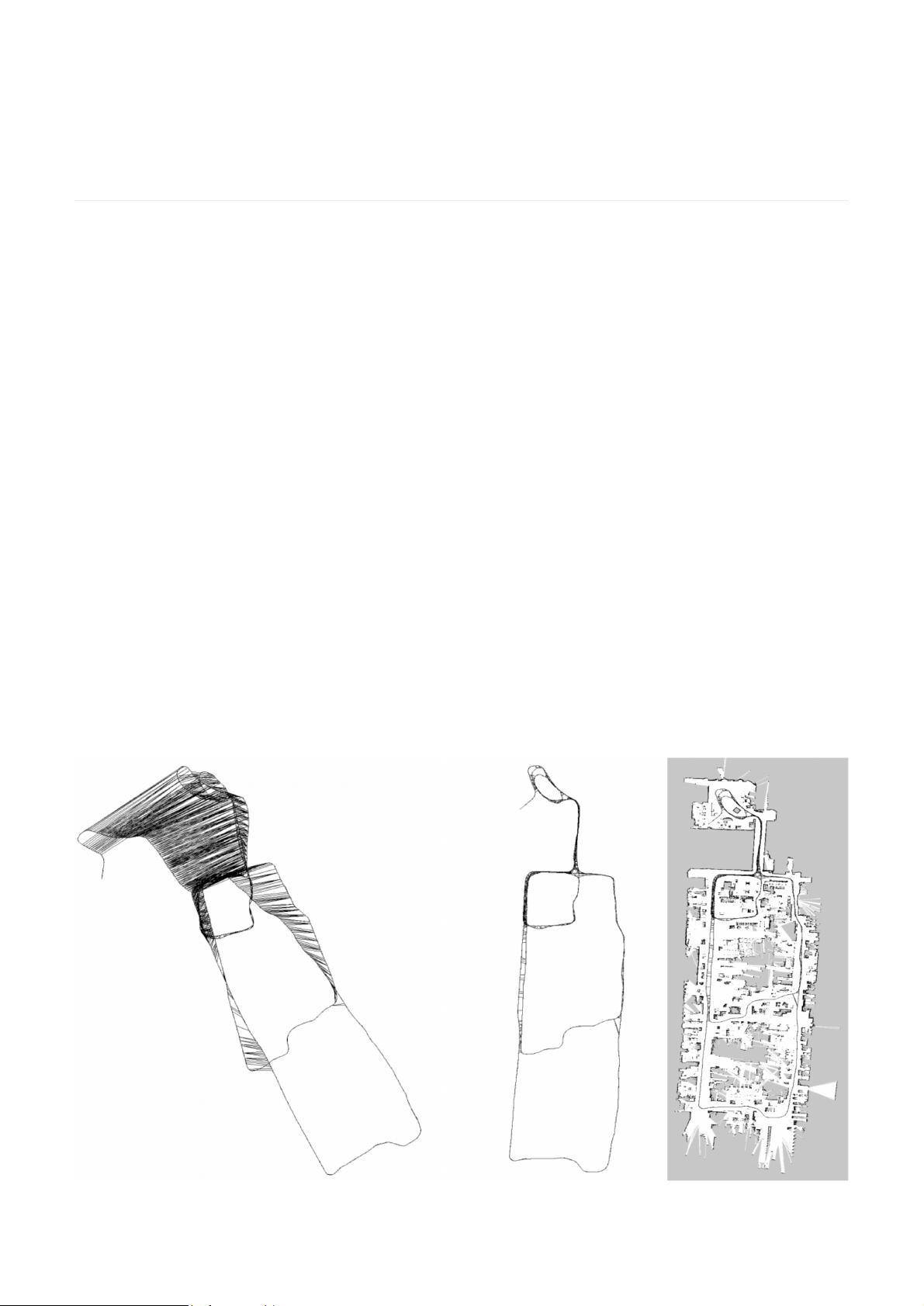
师兄:后来SLAM研究者们发现了其实在视觉SLAM中,虽然包含大量特征点和相机位姿,但其实BA是稀疏的,稀疏
的就好办了,就可以加速了啊!比较代表性的就是2009年,几个大神发表了自己的研究成果《SBA:A software
package for generic sparse bundle adjustment》,而且计算机硬件发展也很快,因此基于图优化的视觉SLAM也
可以实时了!
剩余11页未读,继续阅读
资源评论













