
目录
1 、三次握手
2 、四次挥手
3 、 11
种状态
回到顶部
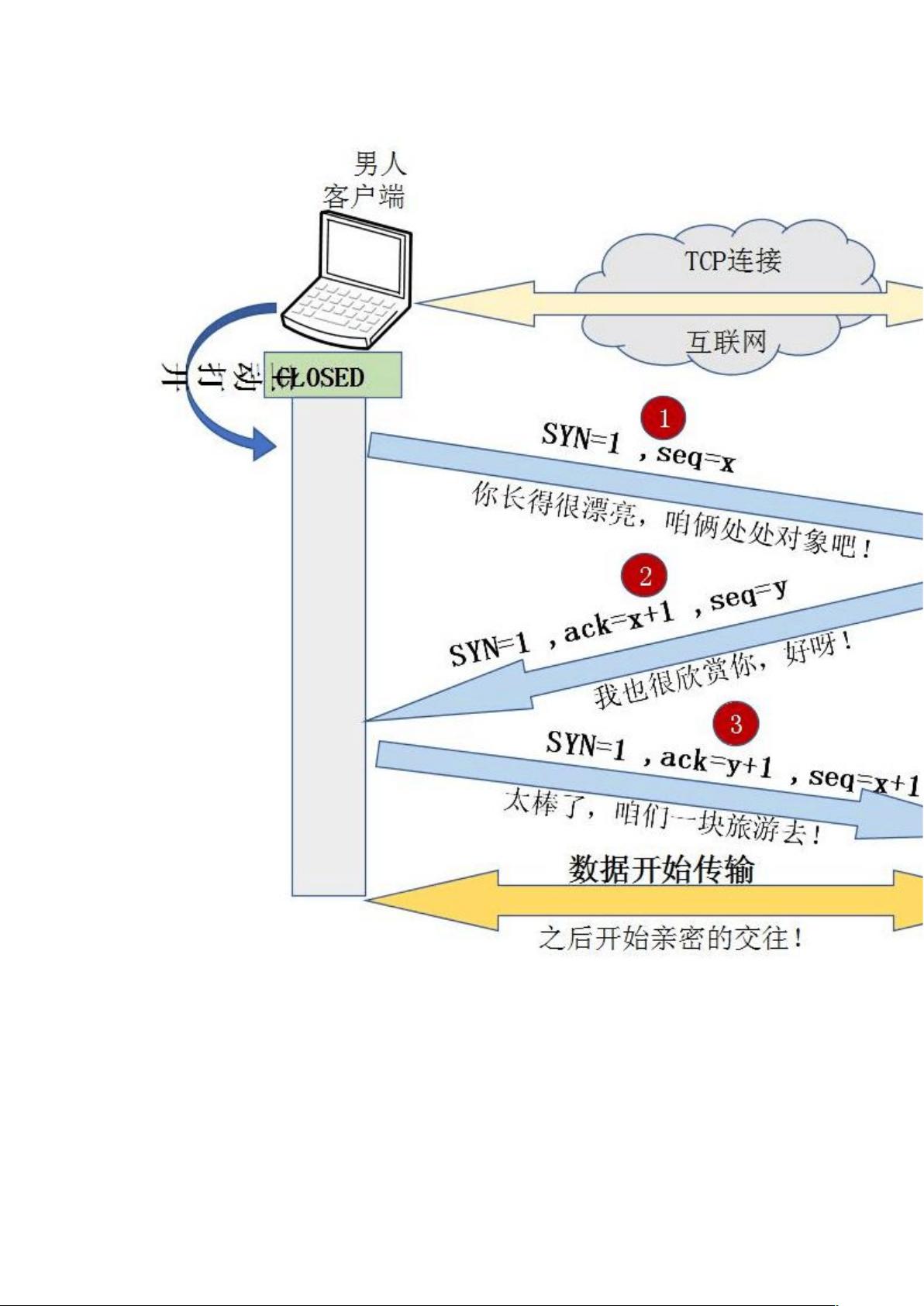
1、三次握手
置位概念:根据 TCP 的包头字段,存在 3 个重要的标识 ACK、SYN、FIN
ACK:表示验证字段)
SYN:位数置 1,表示建立 TCP 连接)
FIN:位数置 1,表示断开 TCP 连接
剩余7页未读,继续阅读
资源评论


AbelZouxinjun
- 粉丝: 0
- 资源: 3









最新资源
- (源码)基于Django和OpenCV的智能车视频处理系统.zip
- (源码)基于ESP8266的WebDAV服务器与3D打印机管理系统.zip
- (源码)基于Nio实现的Mycat 2.0数据库代理系统.zip
- (源码)基于Java的高校学生就业管理系统.zip
- (源码)基于Spring Boot框架的博客系统.zip
- (源码)基于Spring Boot框架的博客管理系统.zip
- (源码)基于ESP8266和Blynk的IR设备控制系统.zip
- (源码)基于Java和JSP的校园论坛系统.zip
- (源码)基于ROS Kinetic框架的AGV激光雷达导航与SLAM系统.zip
- (源码)基于PythonDjango框架的资产管理系统.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


