数字PID控制器设计制作.doc
版权申诉
141 浏览量
2021-10-03
15:31:44
上传
评论
收藏 369KB DOC 举报


- -.
数字 PID 控制器设计
设计任务:
设单位反馈系统的开环传递函数为:
设计数字 PID 控制器,使系统的稳态误差不大于 0.1,超调量不大于
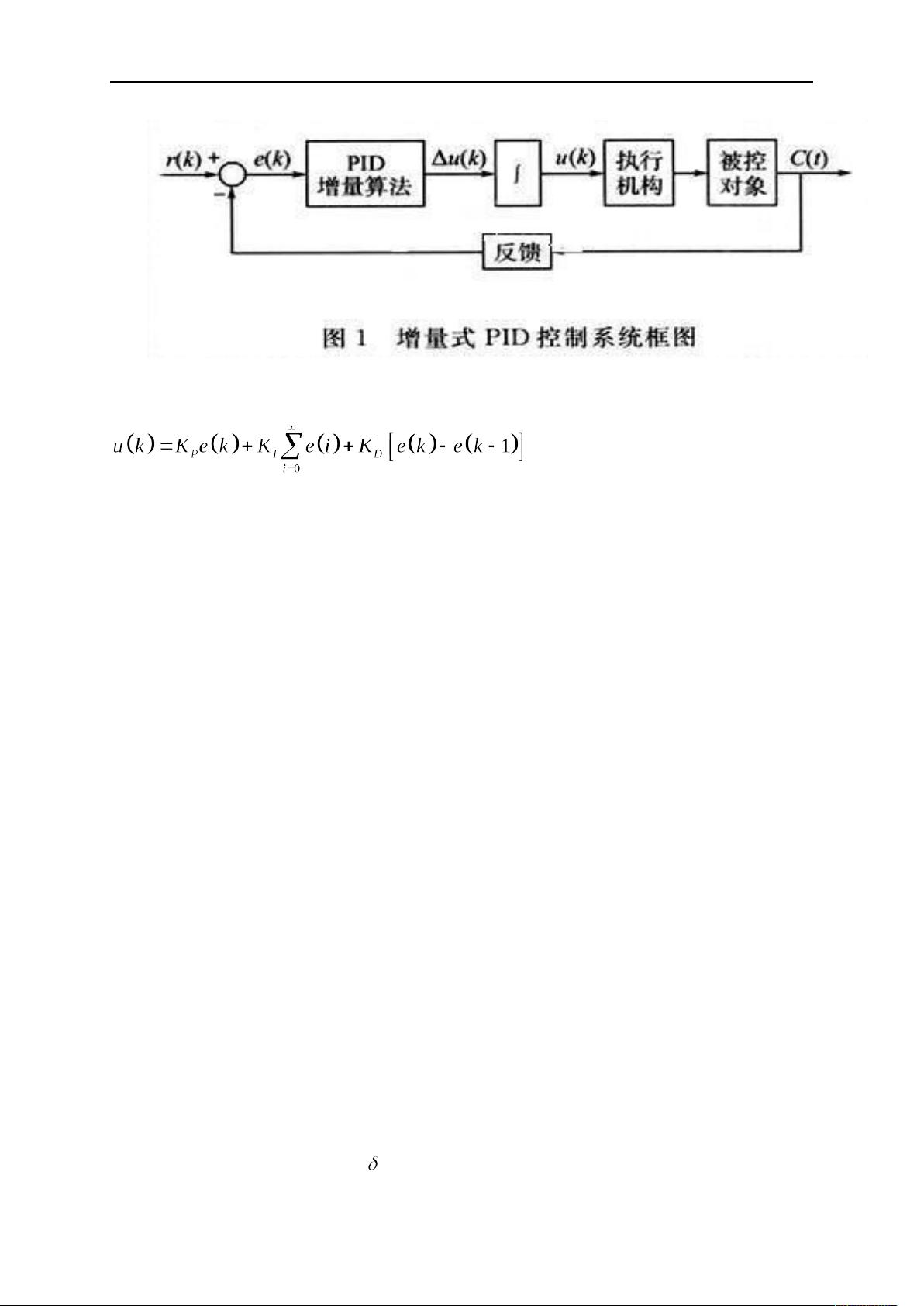
20%,调节时间不大于 0.5s。采用增量算法实现该 PID 控制器。
具体要求:
1.采用 Matlab 完成控制系统的建立、分析和模拟仿真,给出仿真结
果。
2.设计报告内容包含数字 PID 控制器的设计步骤、Matlab 仿真的性
能曲线、采样周期 T 的选择、数字控制器脉冲传递函数和差分方程形式。
3.设计工作小结和心得体会。
4.列出所查阅的参考资料。
数字 PID 控制器设计报告
- - 总结
剩余13页未读,继续阅读
资源评论


pyhm63
- 粉丝: 6
- 资源: 20万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











