
MOTOMAN INFORM 说明
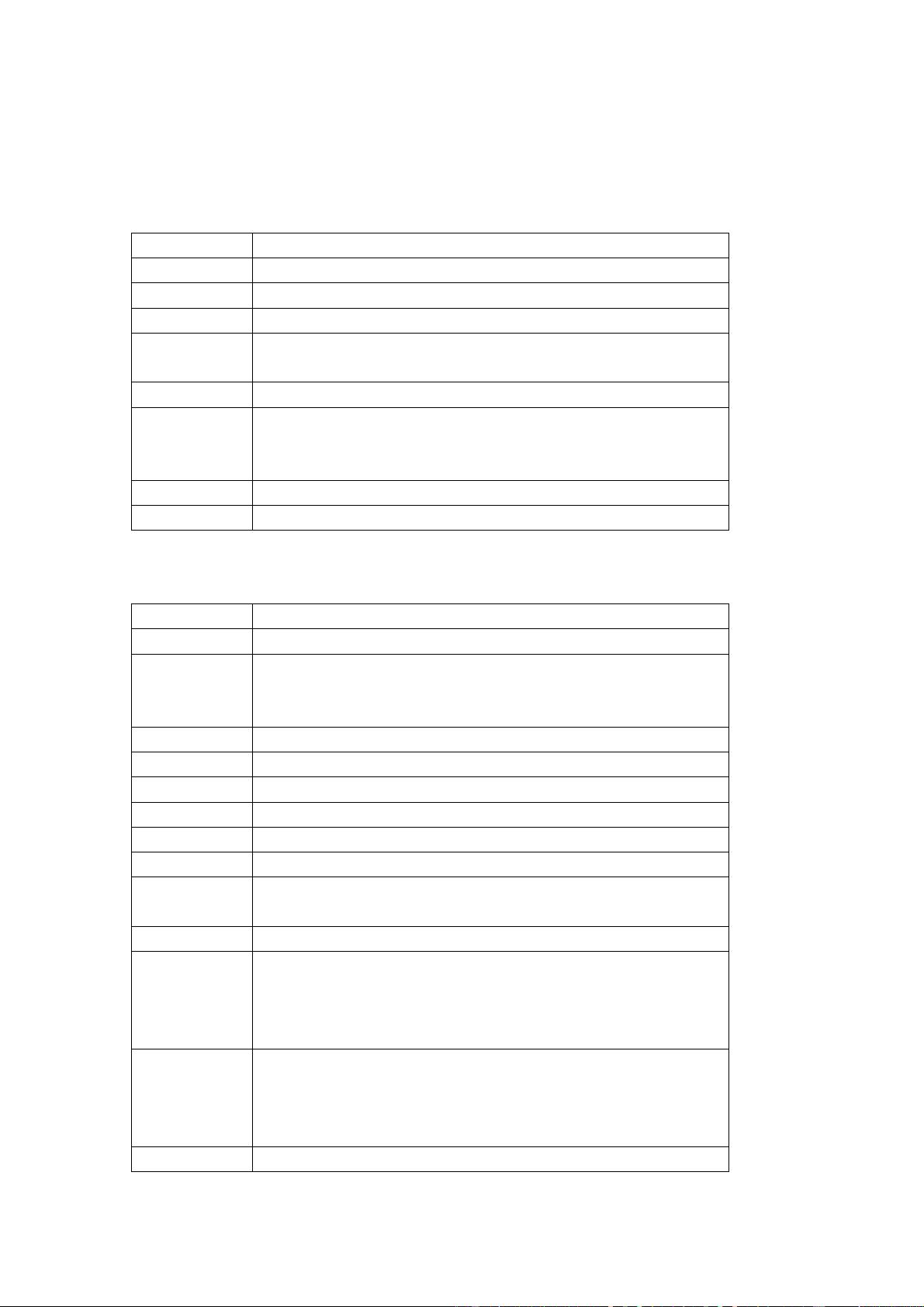
输出入命令
名称 功能说明
DOUT
开/关通用输出信号。
DIN
将信号的状态载入字节型变数中。
WAIT
等待外部信号或者字节型变数的状态和指定状态一致。
PULSE
在通用输出信号上仅输出指定的时间脉冲信号。
对于 PULSE 命令,不用等待命令终了即可实行下条命令。
AOUT
在通用模拟输出板上输出设定电压值。
ARATION
开始匀速模拟输出。
在 MOVL、MOVC、MOVS 的运行中有效。示教再现或者继续运行
时可以实行、轴操作中不能实行。
ARATIOF
结束相称速度模拟输出。
ANTOUT
进行预定输出。
控制命令
JUMP
转移到指定的标签或者程序上。
CALL
调用被指定的程序。
GETARG
是供调用指令以及宏指令的自变量接收指令。实行指令时,选出
被附加在调用指令或者宏指令上的自变量数据,因为在调用程序
或者宏程序内会使用到,所以存储在被指定的局部变数中。
TIMER
仅指定的时间停止。
* (标签) 指定转入位置的标签。
’ (注释) 指定注释
RET
从被调用的程序返回到调用程序。
NOP
不执行任何功能。
PAUSE
暂停程序的实行。
CWAIT
等待下一行指令的实行。
与移动指令的附加项目 NWAIT 标签对等使用。
MSG
显示消息
ADVINIT
在独立控制功能(选项功能)中多个系列之间使用相同变数的情
况下,调整系列之间的变数数据的更改时间。
控制柜内部处理的指令,即使进行此指令程序表面上也无任何变
化。
ADVSTOP
在独立控制功能(选项功能)中多个系列之间使用相同变数的情
况下,调整系列之间的变数数据的存放时间。
控制柜内部处理的指令,即使进行此指令程序表面上也无任何变
化。
PRINT
在终端屏幕上显示指定文字列和变数。
资源评论

 bo136668539292018-05-01还没有仔细去看
bo136668539292018-05-01还没有仔细去看












