使用Cyclone器件中的PLL
需积分: 10 179 浏览量
2009-06-08
08:30:26
上传
评论 1
收藏 1.13MB PDF 举报


使用 Cyclone 器件中的 PLL
译者:Altera 中国区授权代理—骏龙科技有限公司(技术支持部)
www.Cytech.com
|介绍|硬件结构|软件简述|管脚和时钟网络连接|硬件功能| 时钟反馈模式|板子布局|MegaWizard定制功能|时序分析|结论|
介绍
Cyclone™ FPGA 具有锁相环(PLL)和全局时钟网络,提供完整的时钟管理方案。Cyclone PLL 具有时钟倍频和分频、相位偏移、可编程
占空比和外部时钟输出,进行系统级的时钟管理和偏移控制。Altera® Quartus® II 软件无需任何外部器件,就可以启用 Cyclone PLL 和
相关功能。本文将介绍如何设计和使用 Cyclone PLL 功能。
PLL 常用于同步内部器件时钟和外部时钟,使内部工作的时钟频率比外部时钟更高,时钟延迟和时钟偏移最小,减小或调整时钟到输出
(TCO)和建立(TSU)时间。
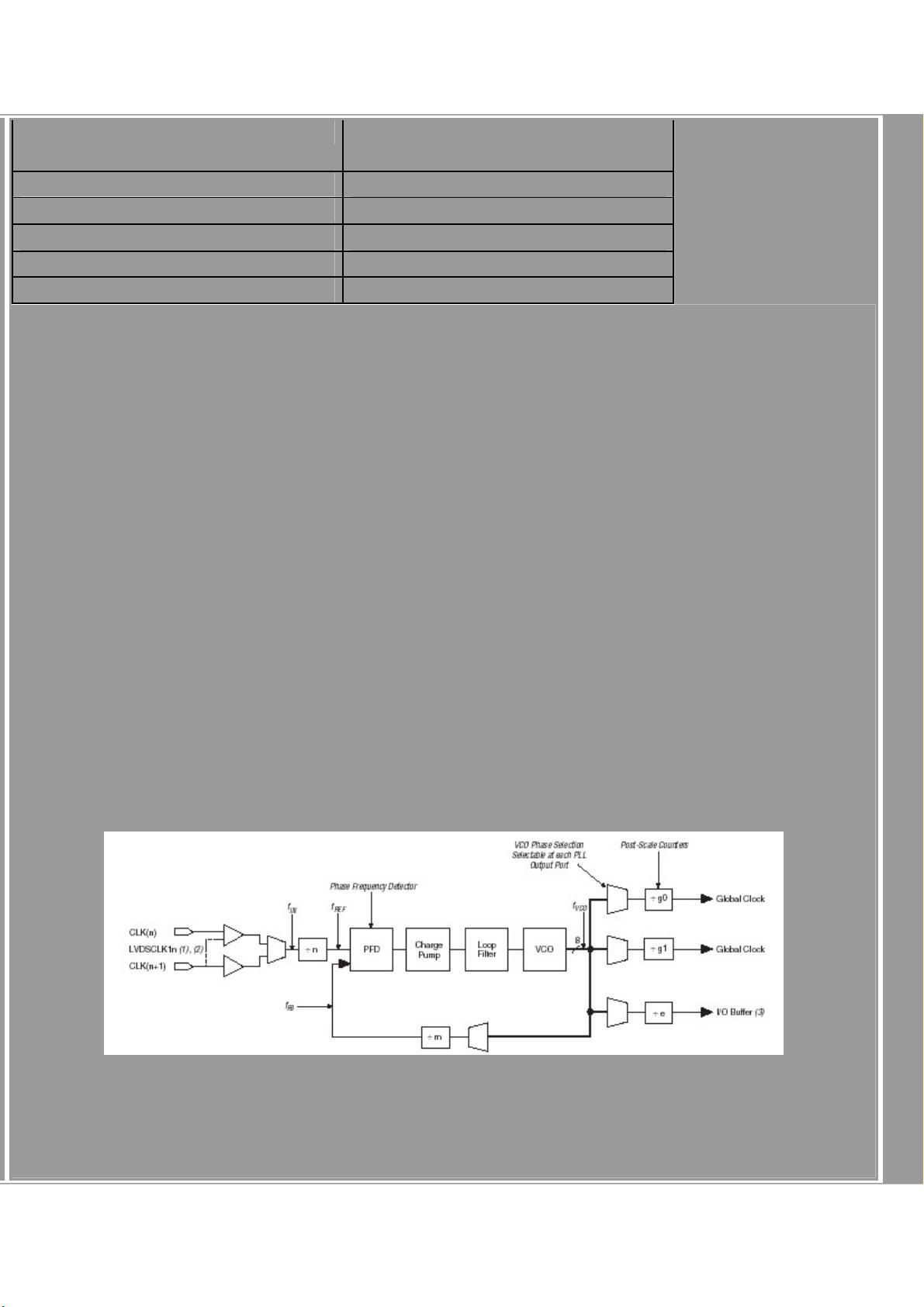
硬件结构
每个Cyclone FPGA包括具有多达两个PLL。表 1 为种型号Cyclone FPGA内可用的PLL数量。
表 1 注释:
(1) 位于器件的左侧中部
(2) 位于器件的右侧中部
表 2 归纳了Cyclone PLL的功能。
表 2.Cyclone PLL 功能
功能 说明
时钟倍频和分频 M/(N×后 scale 计数器)
(1)


剩余31页未读,继续阅读






评论0
最新资源