### 柔性机械臂综述
#### 一、柔性机械臂的优点与挑战
##### 优点:
1. **用料少**:相比传统刚性机械臂,柔性机械臂的设计更加节省材料,这不仅降低了制造成本,还减少了资源消耗。
2. **重量轻**:由于材料的减少和特殊的设计,柔性机械臂整体重量更轻,这意味着它们在移动时更加灵活,能耗更低。
3. **耗能低**:重量轻和用料少的特点使得柔性机械臂在工作时的能耗大大降低,这有助于提高能源利用效率。
##### 缺点及解决方案:
- **弹性变形**:柔性机械臂的主要挑战之一是在操作过程中容易发生弹性变形,这可能会影响其精度和稳定性。为了解决这个问题,在保持上述优点的同时,需要研究新的结构设计和控制方法来优化性能。
#### 二、典型柔性机械臂示例
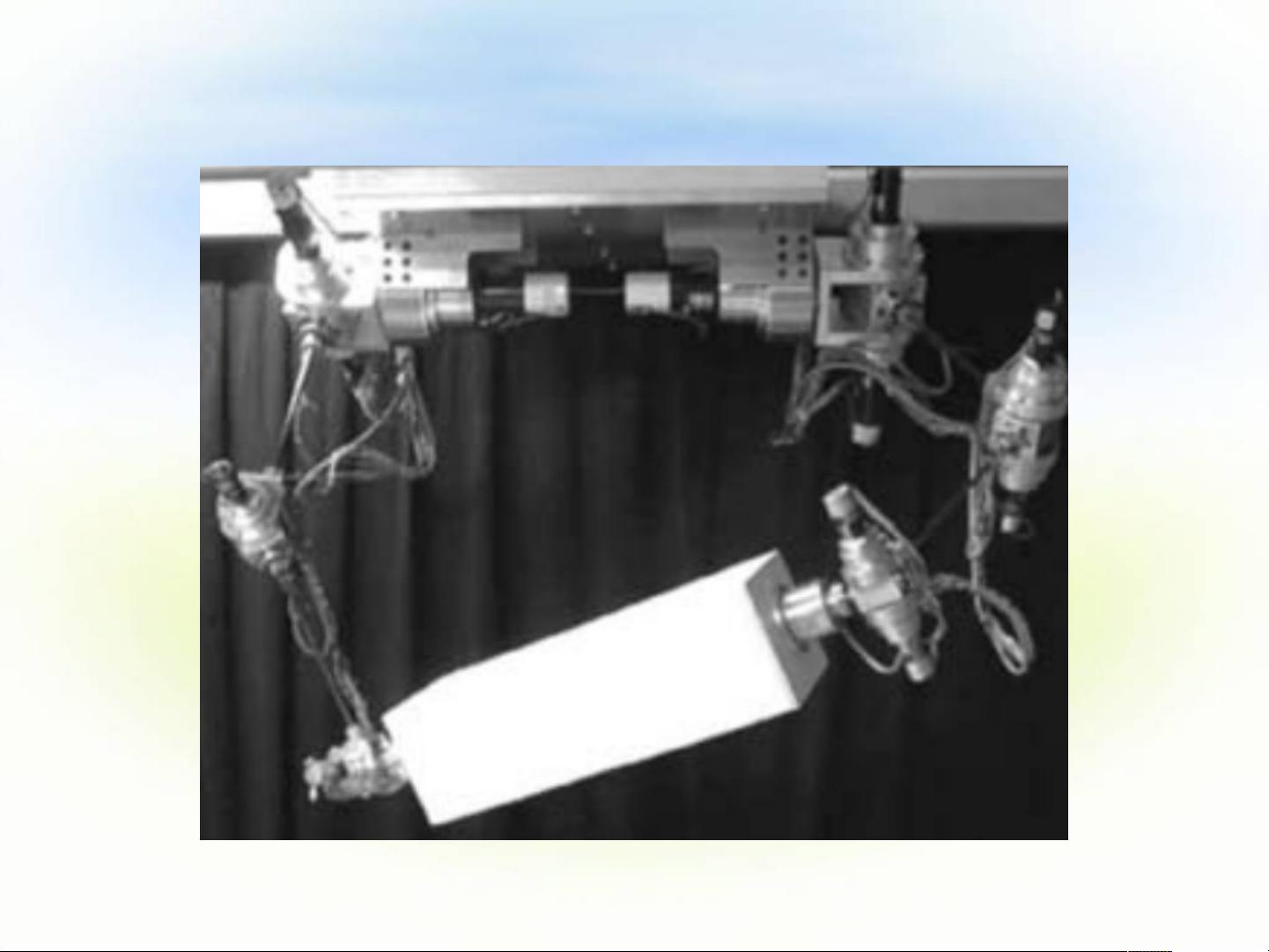
- **Aerospace Dual-Arm Flexible Manipulator**:这是一种专为航空航天领域设计的双臂柔性机械臂,能够在极端条件下执行精确的操作。它的设计考虑了重量和强度的平衡,同时采用了先进的控制算法来克服弹性变形的问题。
- **单杆柔性机械臂的建模**:这类机械臂通常用于实验室研究或小型工业应用中。通过精确的数学模型来预测其行为,并优化设计参数。
#### 三、柔性机械臂建模
##### 1. 模型的抽象化与基本假定
- 在构建模型之前,需要对实际的机械臂进行一定的抽象化处理,以便简化数学模型。这些假设通常包括忽略某些次要因素,如空气阻力等。
- 基本假定可能包括:忽略摩擦力、假设材料均匀且各向同性等。
##### 2. 基本方程的建立
- **坐标系**:首先定义一个合适的坐标系,以便描述机械臂的运动。例如,可以使用直角坐标系或极坐标系。
- **运动分析**:通过对机械臂各个部分的运动进行分析,建立描述其位置、速度和加速度的基本方程。
- **动能和势能的计算**:根据机械臂的质量分布和运动状态,计算其动能和势能。
- **动力学方程**:利用Hamilton原理等方法,建立描述机械臂运动的动力学方程。
##### 3. 用假设模态法对分布参数系统进行离散化
- 为了简化模型并使其更易于求解,采用假设模态法将连续的分布参数系统离散化为一组常微分方程。
- 该方法的关键在于选择合适的模态函数,以准确地描述系统的动态特性。
##### 4. 用有限元法求弹性杆的模态
- 通过建立适当的泛函,利用变分原理求解系统的固有频率和振形函数。
- 使用Hermite插值多项式来近似振形函数,进而求解模态问题。
##### 5. 常微分方程组的求解
- 将离散化后的常微分方程组转换为矩阵形式,便于数值求解。
- 这种方法可以扩展到更复杂的多杆柔性系统中。
#### 四、柔性机器人动力学分析
##### 1. 变形的描述
- **相对坐标描述**:适用于开链机构的动力学分析,也适用于闭链机构通过引入运动约束方程。
- **绝对坐标描述**:适合于描述大变形情况下的几何非线性问题。
##### 2. 变形场的离散化
- **有限元法**:适用于复杂的几何形状和边界条件。
- **有限段法**:适用于含有细长构件的柔性机器人系统。
- **集中质量法**:简化模型,易于实现。
- **假设模态法**:提高计算效率,但可能难以准确描述复杂结构的振动模态。
##### 3. 建模方法
- **矢量力学方法**:基于牛顿-欧拉方程。
- **分析力学方法**:包括拉格朗日方程、哈密顿原理和凯恩方程等。
##### 4. 近似分析
- **运动弹性静力分析**:考虑静态载荷下的弹性变形。
- **运动弹性动力分析方法**:考虑动态载荷下的弹性变形。
- **KED 方法**:忽略弹性振动对大范围刚体运动的影响,简化分析过程。
通过对这些关键知识点的深入理解,我们可以更好地设计和优化柔性机械臂,以满足不同应用场景的需求。