Structure design of wheeled mobile robots
Abstract: with the robot technology in an alien exploration, field survey, military
and security new areas to be increasingly widely adopted, robot technology by indoor,
outdoor by fixed, to move towards artificial environment, the artificial environment.
This topic is the basic link, robot design for the follow-up about robots can provide
valuable reference and useful ideas platform.
This article summarizes the existing robot mobile platform development status and
trends of operating the arm structure and principle of common, According to the
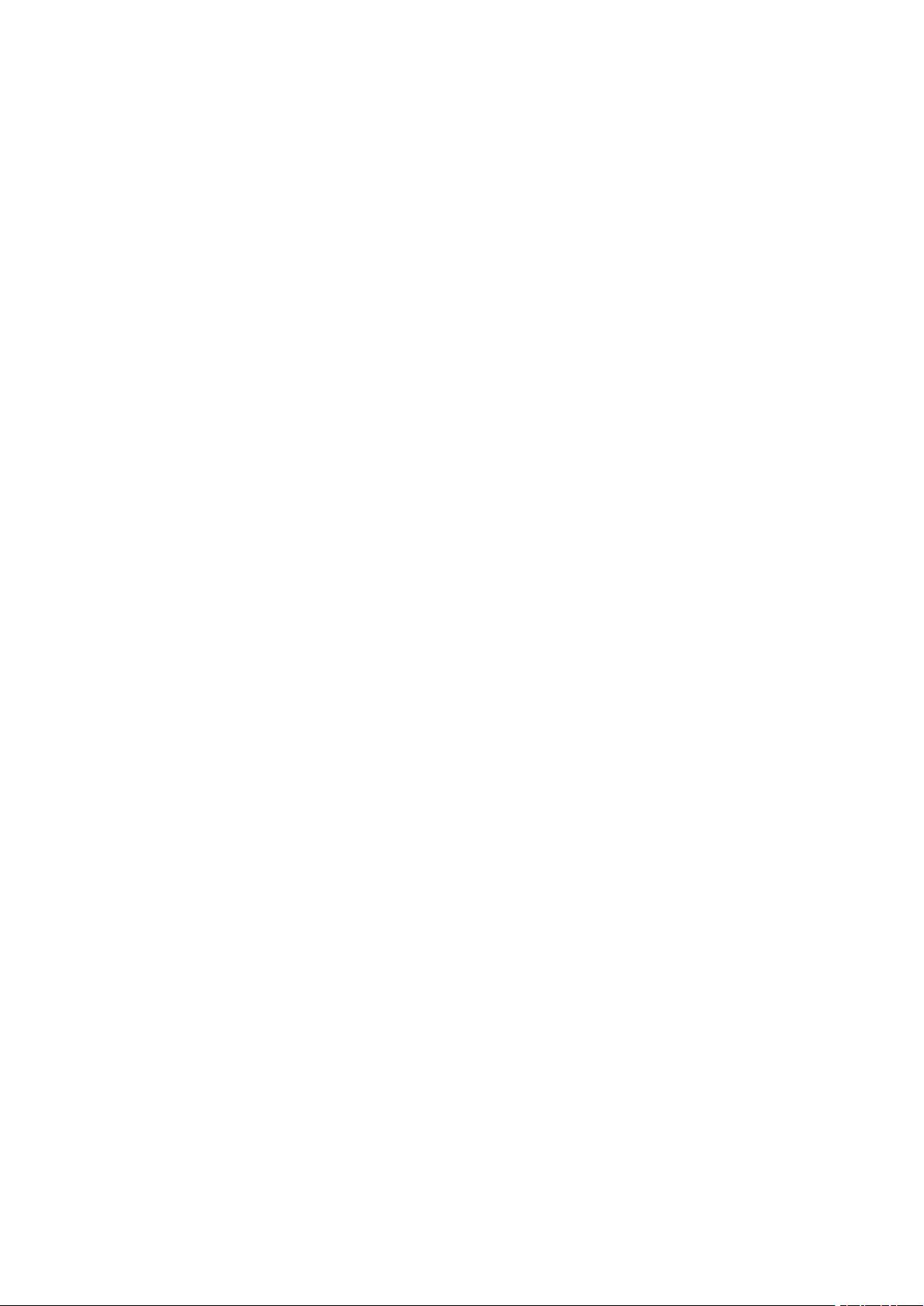
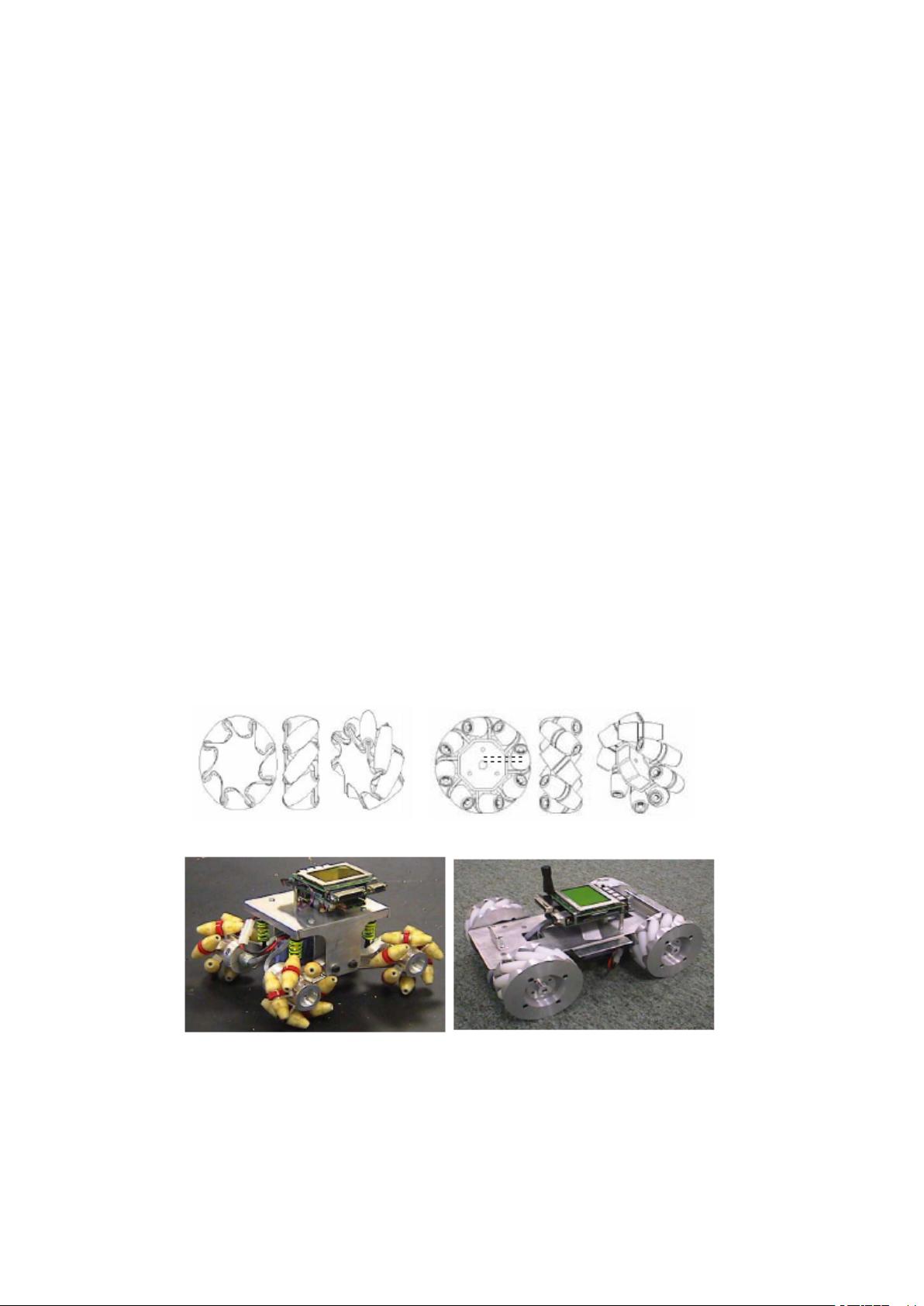
selected scheme of mechanical arm with ontology omni-directional mobile robots
designed, including the design of all-round wheel rotating mechanism, wheel steering
mechanism of design and the design of robot manipulator. Request to change
direction, move the omni-directional mobile institution, can quickly and effectively
flexible the reaches the specified location; Mechanical arm operation scope, sports
flexible, simple and compact structure and size is small, can quickly and accurately
completed tasks. The design is completed to analyze the performance of the
omni-directional mobile institutions for subsequent research, provide reliable
reference and basis.
Keywords: Robot mobile platform manipulator simple accurate and quick