

Hindawi Publishing Corporation
VLSI Design
Volume 2010, Article ID 213043, 11 pages
doi:10.1155/2010/213043
Research Article
FPGA Implementation of an Amplitude-Modulated
Continuous-Wave Ultrasonic Ranger Using Restructured
Phase-Locking Scheme
P. Sumathi
1
and P. A. Janakiraman
2
1
DA-IICT, Department of Information and Communication Technology, Gandhinagar, Gujarat 382007, India
2
Indian Institute of Technology Madras, Department of Electrical Engineering, Chennai 600036, India
Correspondence should be addressed to P. Sumathi, sumichan04@yahoo.co.in
Received 30 May 2009; Revised 9 September 2009; Accepted 8 December 2009
Academic Editor: Ethan Farquhar
Copyright © 2010 P. Sumathi and P. A. Janakiraman. This is an open access article distributed under the Creative Commons
Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is
properly cited.
An accurate ultrasonic range finder employing Sliding Discrete Fourier Transform (SDFT) based restructured phase-locked loop
(RPLL), which is an improved version of the recently proposed integrated phase-locking scheme (IPLL), has been expounded.
This range finder principally utilizes amplitude-modulated ultrasonic waves assisted by an infrared (IR) pilot signal. The phase
shift between the envelope of the reference IR pilot signal and that of the received ultrasonic signal is proportional to the range.
The extracted envelopes are filtered by SDFT without introducing any additional phase shift. A new RPLL is described in which
the phase error is driven to zero using the quadrature signal derived from the SDFT. Further, the quadrature signal is reinforced
by another cosine signal derived from a lookup table (LUT). The pulse frequency of the numerically controlled oscillator (NCO)
is extremely accurate, enabling fine tuning of the SDFT and RPLL also improves the lock time for the 50 Hz input signal to 0.04 s.
The percentage phase error for the range 0.6 m to 6 m is about 0.2%. The VHDL codes generated for the various signal processing
steps were downloaded into a Cyclone FPGA chip around which the ultrasonic ranger had been built.
1. Introduction
Ultrasonic sensors find applications generally in distance
measurement, indoor mobile robot control, for environment
information, gleaning, localization, and map building, vibra-
tion measurements, and safety systems like intelligent airbag
control [1–4]. Many range-finding techniques are found in
the literature, based on either the time of flight (TOF) or
the continuous wave method [5–7]. A variety of continuous
wave methods have been reported; notable among them
are based on the multifrequency and amplitude-modulated
(AM) schemes [8, 9]. The significant advantages of the AM
continuous-wave method over the TOF were presented in
[10]. The phase shift observed in the ultrasonic wave with
respect to the distance traveled can be used to measure the
range. For a 40 kHz sound wave, the maximum measurable
range using phase shift is only 8.6 mm. In the present
work, to enhance the measurable range to 6.86 m, the
ultrasonic signal is amplitude modulated by a 50 Hz signal,
which is more appropriate for mobile robot localization and
navigation in indoor applications.
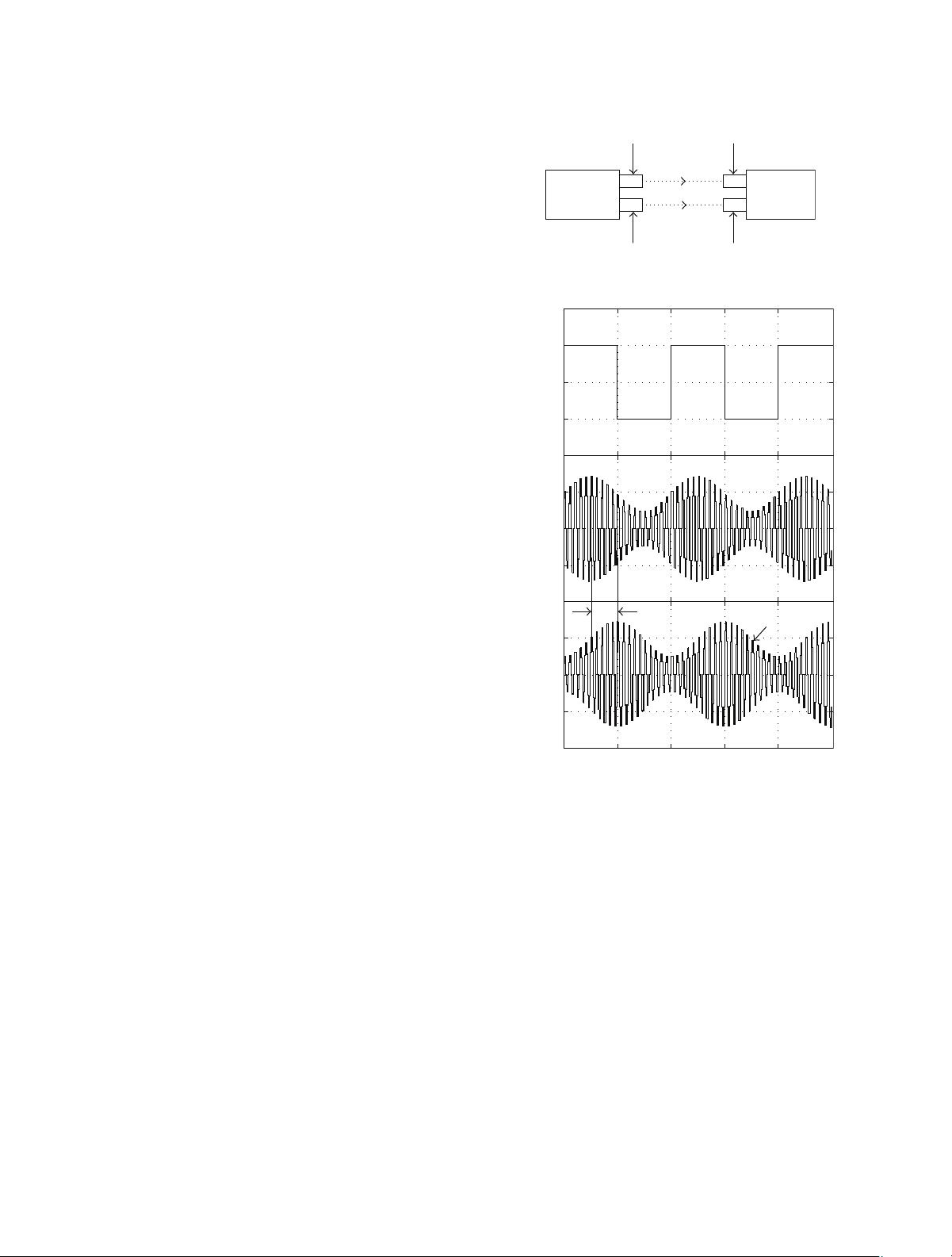
In this scheme, a low-frequency-modulated Infrared (IR)
is used as a pilot signal. Another ultrasonic signal (US)
modulated by the same low-frequency signal is utilized for
estimating the range. A novel procedure using Sliding Dis-
crete Fourier transform (SDFT) can be employed to extract
the fundamental component of the envelope of the received
ultrasonic signal [11]. The sampling pulse frequency of the
SDFT block is tuned precisely by an integrated phase-locked
loop so that exactly one full period of the envelope signal
can be accommodated in a window of width 128 [12]. Two
such PLL’s, one for the extraction of the sinusoidal envelope
of the infrared pilot signal, and another for ultrasonic signal
are employed in the range-finding equipment. The PLL is
basically a feedback circuit minimizing the phase error by
correlating the given envelope signal with the quadrature
剩余10页未读,继续阅读
资源评论


mahao007
- 粉丝: 7
- 资源: 20









最新资源
- comsol计算光子晶体平带合并BIC,复现包含二维能带,三维能带,品质因子和远场偏振计算
- 融合正余弦和柯西变异的麻雀搜索算法优化CNN-BiLSTM 仿真软件:matlab 主要内容:融合正余弦和柯西变异的麻雀搜索算法,对CNN-BiLSTM的学习率,正则化参数,BiLSTM隐含层神经元个
- 法兰内孔铣床sw18全套技术资料100%好用.zip
- 一维光子晶体超窄带滤波器 光学仿真,出模型文件,matlab代码以及说明文档
- 双馈惯量控制,下垂控制,减载控制,桨距角控制参与调频,四机两区域 三机九节点仿真建模
- 基于FPGA的FOC电流环实现 1.仅包含基本的电流环 2.采用verilog语言编写 3.电流环PI控制器 4.采用SVPWM算法 5.均通过处理转为整数运算 6.采用ADC采样,型号为AD7928
- 果蔬清洗机总体结构设计(step+exb+说明书)全套技术资料100%好用.zip
- VESC STM32F4磁链观测器,VESC磁链观测器 无感正弦FOC控制 vesc中使用的方法 已经移植到了自己的工程中,实现0速闭环启动 代码、文档、仿真是一一对应的,方便学习
- Dependency Walker 的新版本支持windows 10
- Python求解XDOJ平台三位整数各位置数字之和问题的技术实现与应用场景
- 滚动式不锈钢板材双面自动喷砂机sw14可编辑全套技术资料100%好用.zip
- 冲床平面送料程序,支持X轴和Y轴两个方向送料,PLC使用FX1S,触摸屏是昆仑通态,适用于绝大多数板材冲压冲裁自动送料
- 基于python实现的三维重建算法SFM源码(高分项目)
- 结合模型预测(MPC)的同步机控制(VSG)-MATLAB simulink仿真 等效直流电源,三相全桥逆变,LC型滤波器,并网运行 单步模型预测控制,同步机控制 用模型预测模块代替电压电流内环,取消
- 基于python的三维重建算法Structure from Motion(Sfm)实现代码.zip
- 基于FPGA的LDPC译码算法(提供ISE和Qii两个版本),包括MATLAB仿真,verilog程序,支持定制算法程序 从LDPC码的基础理论出发,在研究前人成果的基础上,针对CMMB标准,采取理论
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


