ICM20608 datasheet
需积分: 0 150 浏览量
2024-02-22
15:03:32
上传
评论
收藏 1.49MB PDF 举报

ICM-20600
High Performance 6-Ais MEM“ MotioTakig™ Deie i
2.5x3x0.91mm Package
InvenSense reserves the right to change the detail
specifications as may be required to permit
improvements in the design of its products.
InvenSense Inc.
1745 Technology Drive, San Jose, CA 95110 U.S.A
+1(408) 988–7339
www.invensense.com
Document Number: DS-000184
Revision: 1.0
Revision Date: 10/27/2016
GENERAL DESCRIPTION
The ICM-20600 is a 6-axis MotionTracking device that
combines a 3-axis gyroscope, 3-axis accelerometer, in a small
2.5 mm x 3 mm x 0.91 mm (14-pin LGA) package.
High performance specs
o Gyroscope sensitivity error: ±1%
o Gyroscope noise: ±4 mdps/Hz
o Accelerometer noise: 100 µg/Hz
Includes 1 KB FIFO to reduce traffic on the serial bus
interface, and reduce power consumption by allowing
the system processor to burst read sensor data and then
go into a low-power mode
EIS FSYNC support
ICM-20600 includes on-chip 16-bit ADCs, programmable
digital filters, an embedded temperature sensor, and
programmable interrupts. The device features an operating
voltage range down to 1.71V. Communication ports include
I
2
C and high speed SPI at 10 MHz.
ORDERING INFORMATION
PART
TEMP RANGE
PACKAGE
ICM-20600†
−°C to +°C
14-Pin LGA
†Denotes RoHS and Green-Compliant Package
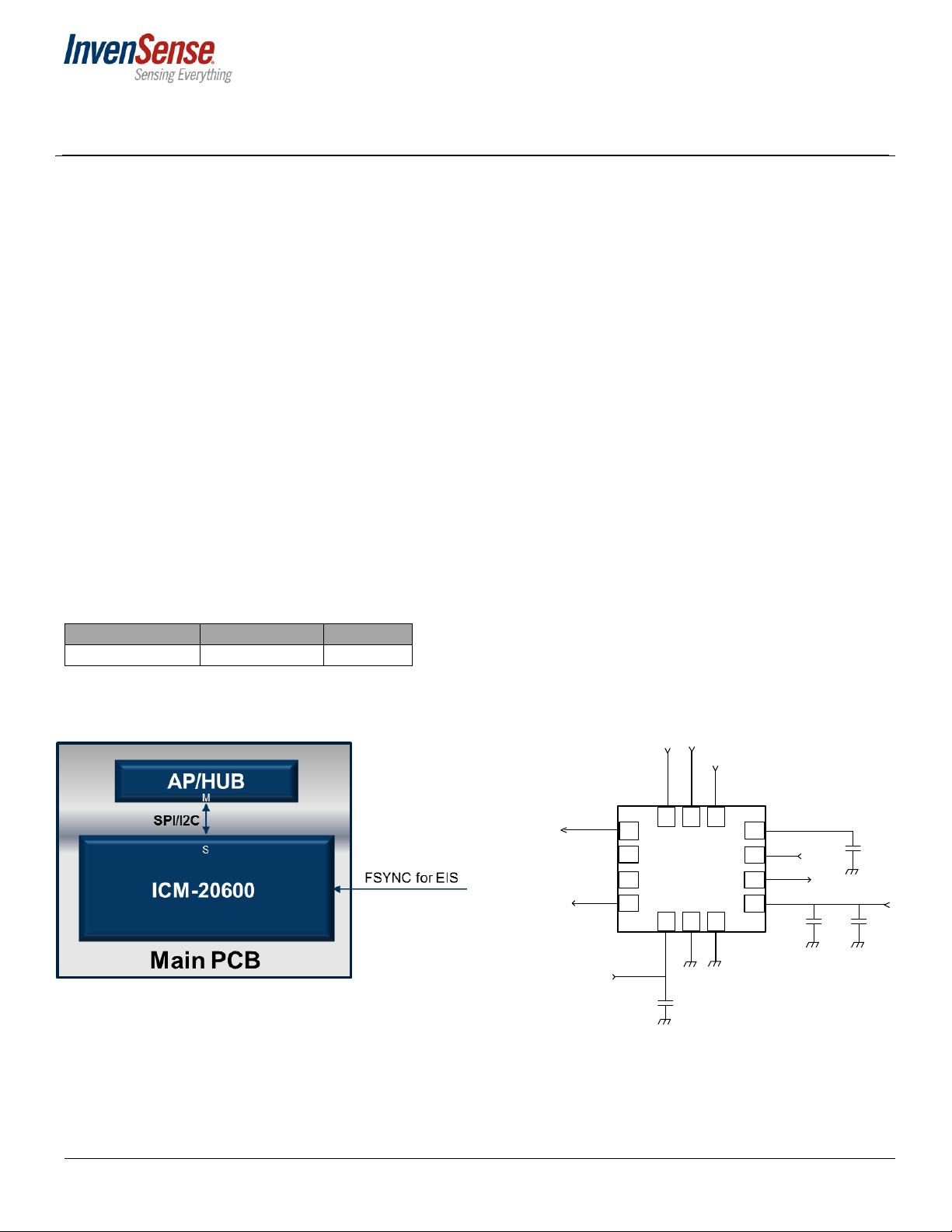
BLOCK DIAGRAM
APPLICATIONS
Smartphones and Tablets
Wearable Sensors
IoT Applications
Motion-based game controllers
3D remote controls for Internet connected DTVs and
set top boxes, 3D mice
FEATURES
3-Axis Gyroscope with Programmable FSR of
±250 dps, ±500 dps, ±1000 dps, and ±2000 dps
3-Axis Accelerometer with Programmable FSR of ±2g,
±4g, ±8g, and ±16g
User-programmable interrupts
Wake-on-motion interrupt for low power operation
of applications processor
1 KB FIFO buffer enables the applications processor to
read the data in bursts
On-Chip 16-bit ADCs and Programmable Filters
Host interface: 10 MHz SPI or 400 kHz Fast Mode I
2
C
Digital-output temperature sensor
VDD operating range of 1.71 to 3.45V
MEMS structure hermetically sealed and bonded at
wafer level
RoHS and Green compliant
TYPICAL OPERATING CIRCUIT
INT2
VDD
1.71 – 3.45VDC
C3, 10 nF
1.71 – 3.45VDC
SDI
SDO
INT2
FSYNC
SDA / SDI
VDDIO
AD0 / SDO
nCS
2
1
4
3
5 6 7
10
11
8
9
14 13 12
SCLK
SCL / SCLK
INT1
INT1
GND
FSYNC
ICM-20600
NC
NC
C2, 0.1 mF C4, 2.2 mF
nCS
RESV
REGOUT
C1, 0.1 mF




剩余56页未读,继续阅读
资源评论


mftang
- 粉丝: 3678
- 资源: 92









最新资源
- ST3007SRG-VB一款SOT23封装P-Channel场效应MOS管
- 资源专区-课程设计-编程作业-【docker配置使用】资源&&详细讲解使用
- 基于microPython开发单片机实现utf-8转gb2312
- kmp算法的C语言实现项目源代码课设.zip
- dbeaver-ce-24.1.0
- 资源专区-小白必看-通信仿真资源-傅里叶变换、滤波器、FFT等经典算法
- 计算机毕设论文&作业&学习资料&项目源码&教程-基于深度学习的图像识别系统
- 小红书整体框架玩法 pdf
- javaweb管理系统软件设计与分析期末大作业.zip
- mongodb-linux-x86-64-rhel70-4.0.28.tgz
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


