PDPS是Process Designer & Process Simulate的简称,它们同是西门子公司Tecnomatix下的产品。PDPS是一套软件系统,其中包含两个不同功能的产品,即PD(Process Designer的简称),它的主要功能是数据管理与工艺规划;PS(Process Simulate的简称),它的主要功能是实现仿真验证与离线编程。
【PDPS虚拟仿真基础操作】涉及的是西门子公司Tecnomatix下的PDPS软件,该软件由Process Designer (PD) 和 Process Simulate (PS) 两部分组成。PD主要用于数据管理和工艺规划,而PS则专注于仿真验证和离线编程。
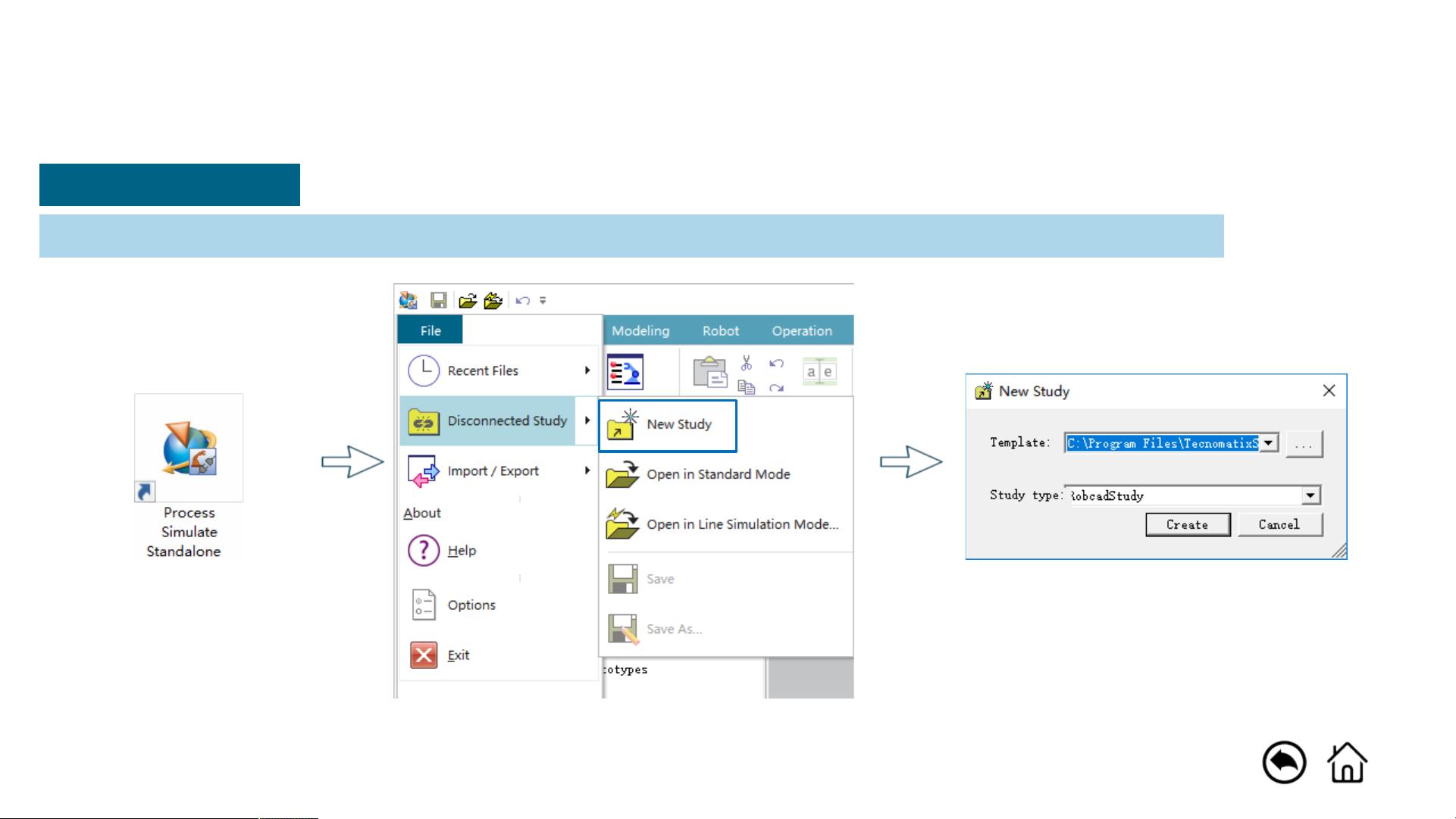
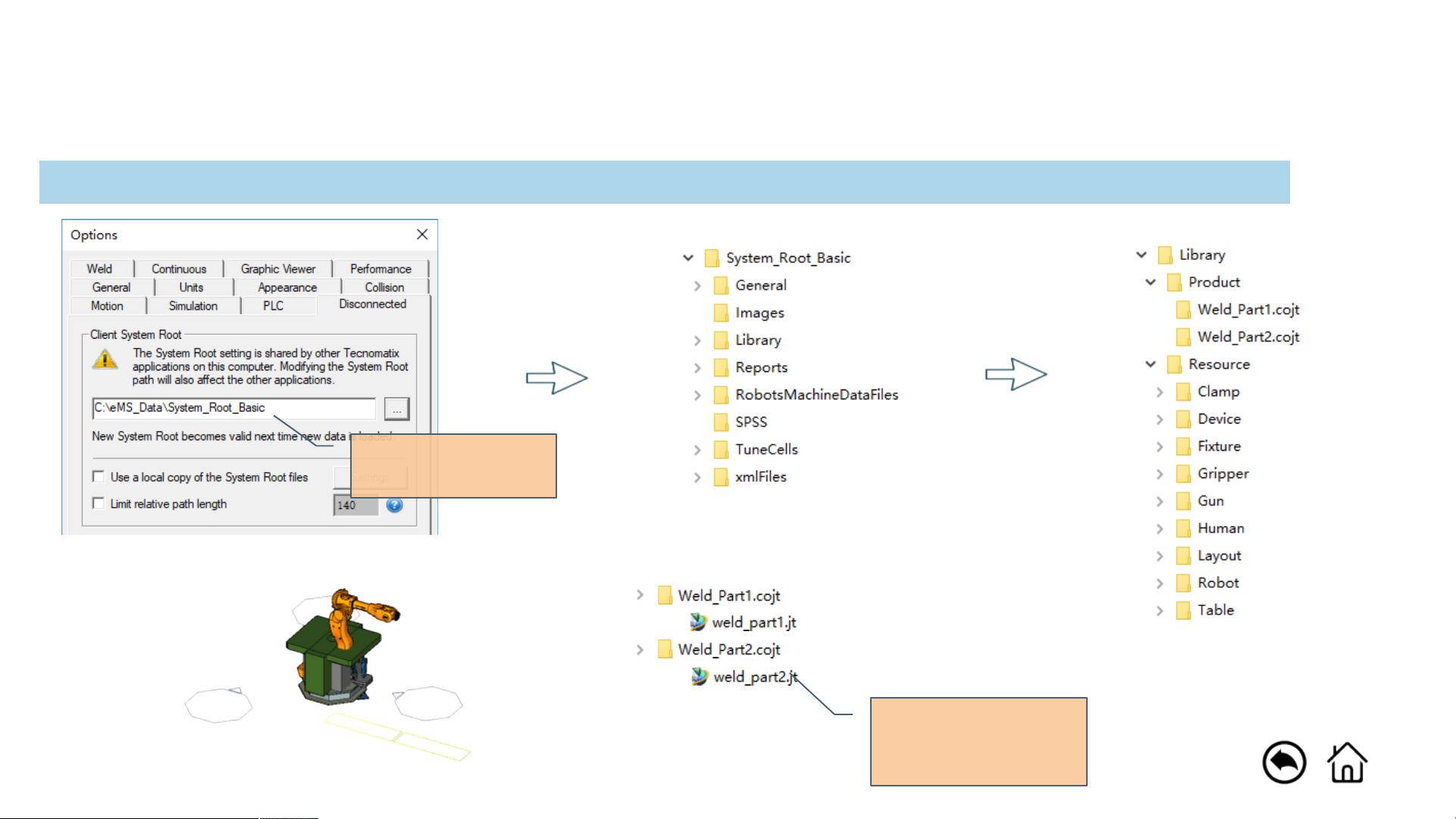
在创建仿真项目时,首先要启动Process Simulate Standalone并创建一个新的RobcadStudy。设置Client System Root至预设的三维数据目录,确保每个项目都有对应的独立System Root,并支持jt格式文件。如果需要导入非jt格式文件,可以利用"Convert and insert CAD Files"命令进行转换导入。
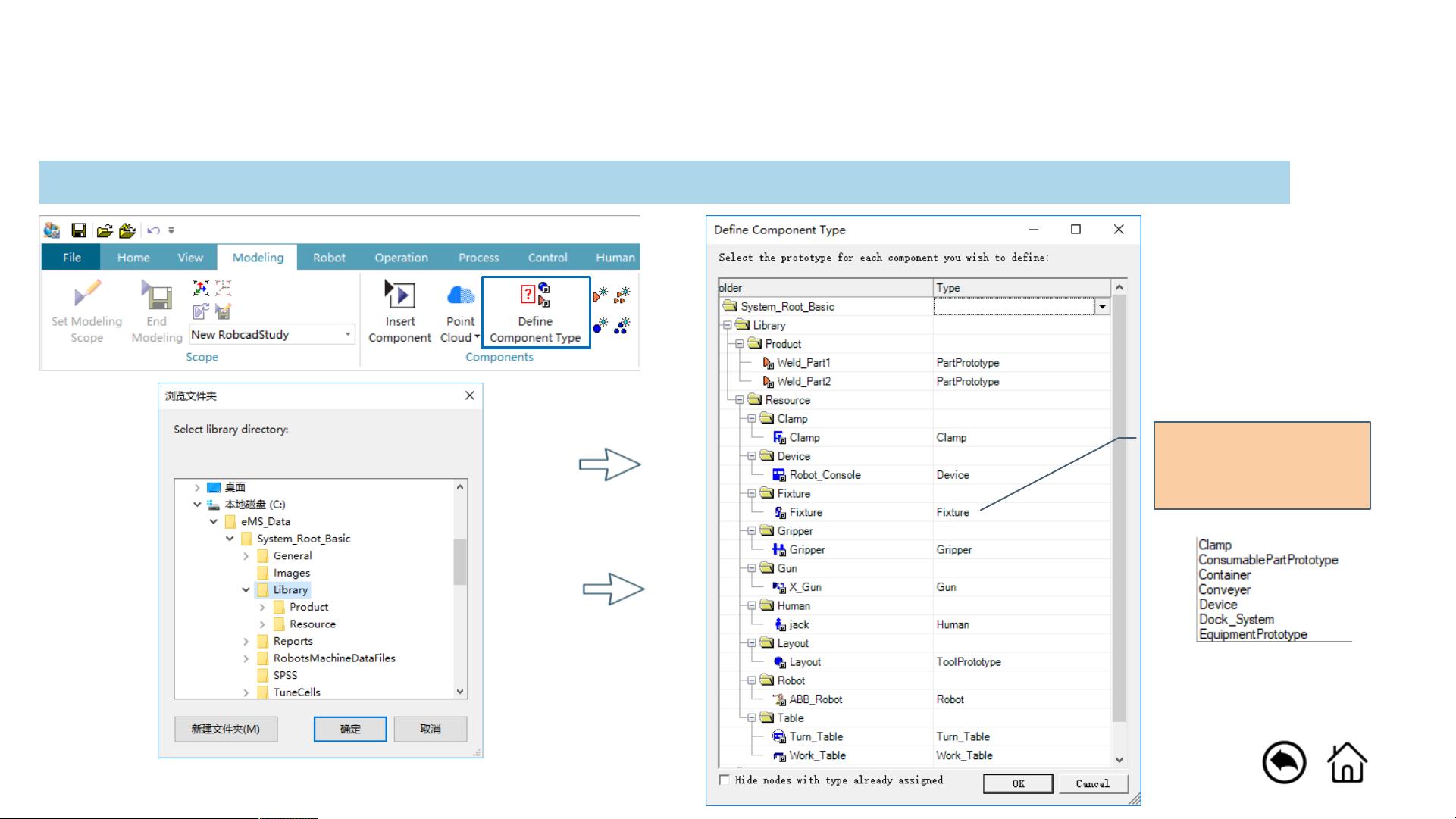
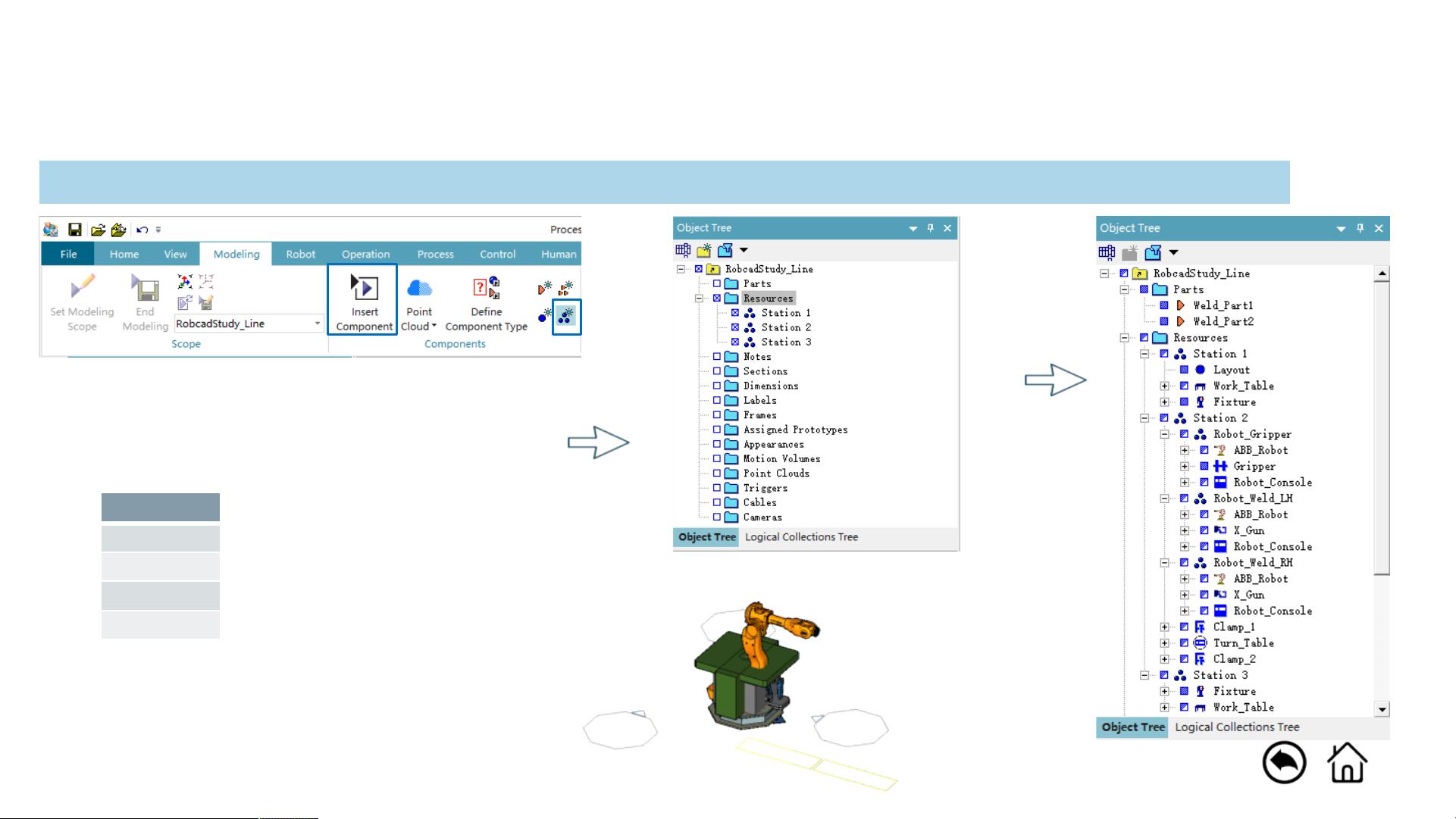
接着,定义三维数据资源的类型,包括产品和资源的Type,确保符合实际的分类。通过Modeling → Insert Component命令,根据设备清单将产品和资源插入仿真场景,例如Robot、Fixture、Robot_Console、Clamp、Gripper、Turn_Table、Gun和Work_Table等。
进一步完善工艺流程,使用Home → New Compound Operation和New Weld Operation创建操作,补充工位的操作步骤。完成布局后,使用Save Study保存为.psz文件并关闭项目。
在离线编程阶段,可以使用Process Simulate Standalone – eMServer compatible打开.psz文件,进行资源的添加和布局。通过Self Original Pick Intent、Snap Pick Intent等工具,调整资源在布局中的位置,如将Clamp与Turn Table绑定,避免机器人与底座的干涉。此外,可以使用Mount Tool命令安装焊枪,并通过Placement Manipulator调整焊枪的位置,确保其TCP(Tool Center Point)与机器人TCP一致。
在焊接分析验证环节,新建操作组,创建模型运动、设备、抓手、机器人搬件、焊接等操作,定义焊接任务,并设置运动操作。同时,可以进行连续特征、设备控制组、通用机器人、机器人参考路径等操作的建立,以实现基于时序的仿真运行。
PDPS虚拟仿真基础操作涵盖了工艺规划、资源布局、离线编程和焊接分析验证等关键步骤,是工业自动化和智能制造领域中重要的仿真工具,能有效提升生产线的设计效率和质量。通过熟练掌握这些操作,用户能够模拟真实的生产环境,提前发现并解决问题,优化生产流程。