

目录
第 1 章 MPU6050 介绍...........................................................................................................1
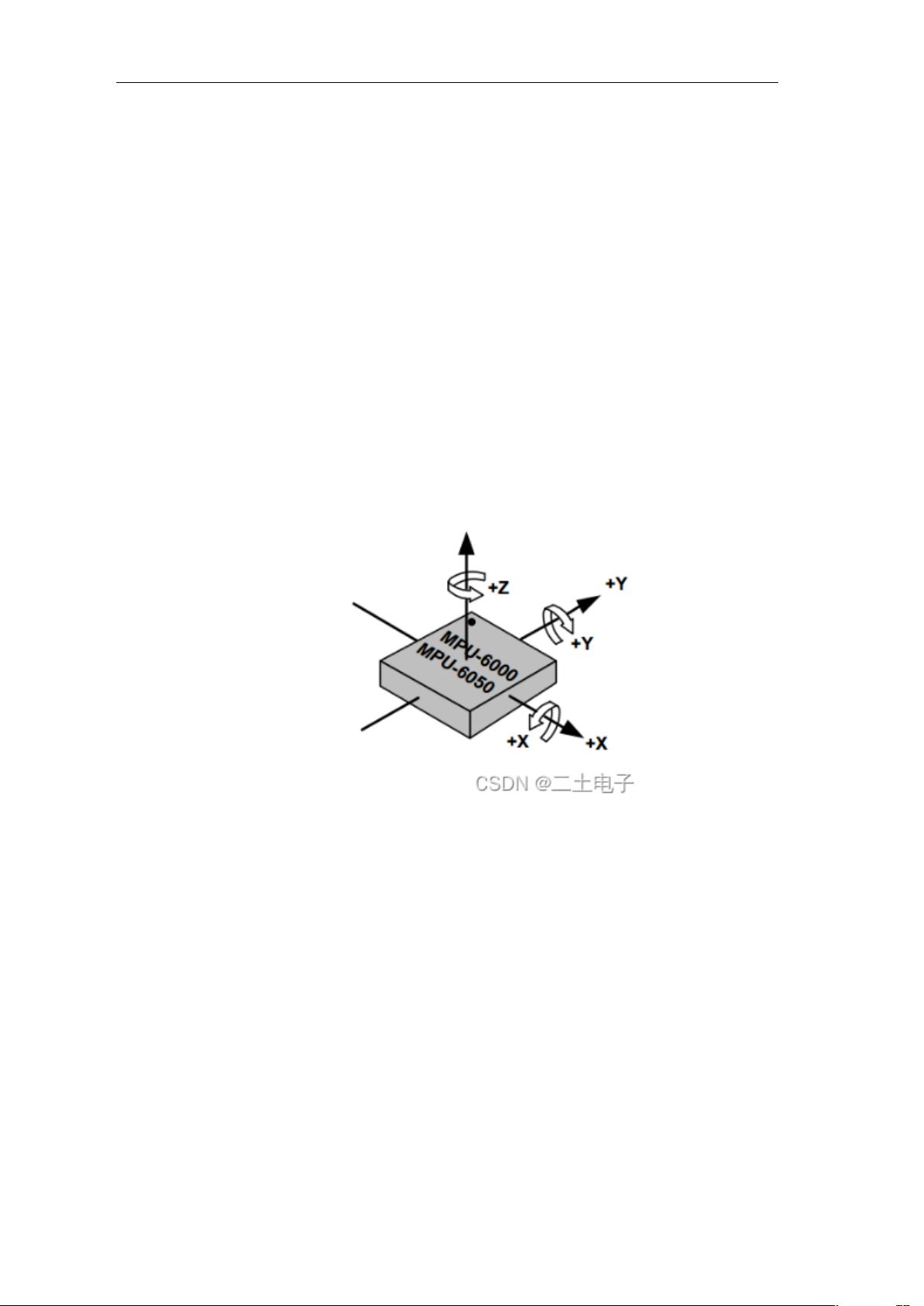
1.1 基本介绍 .......................................................................................................................1
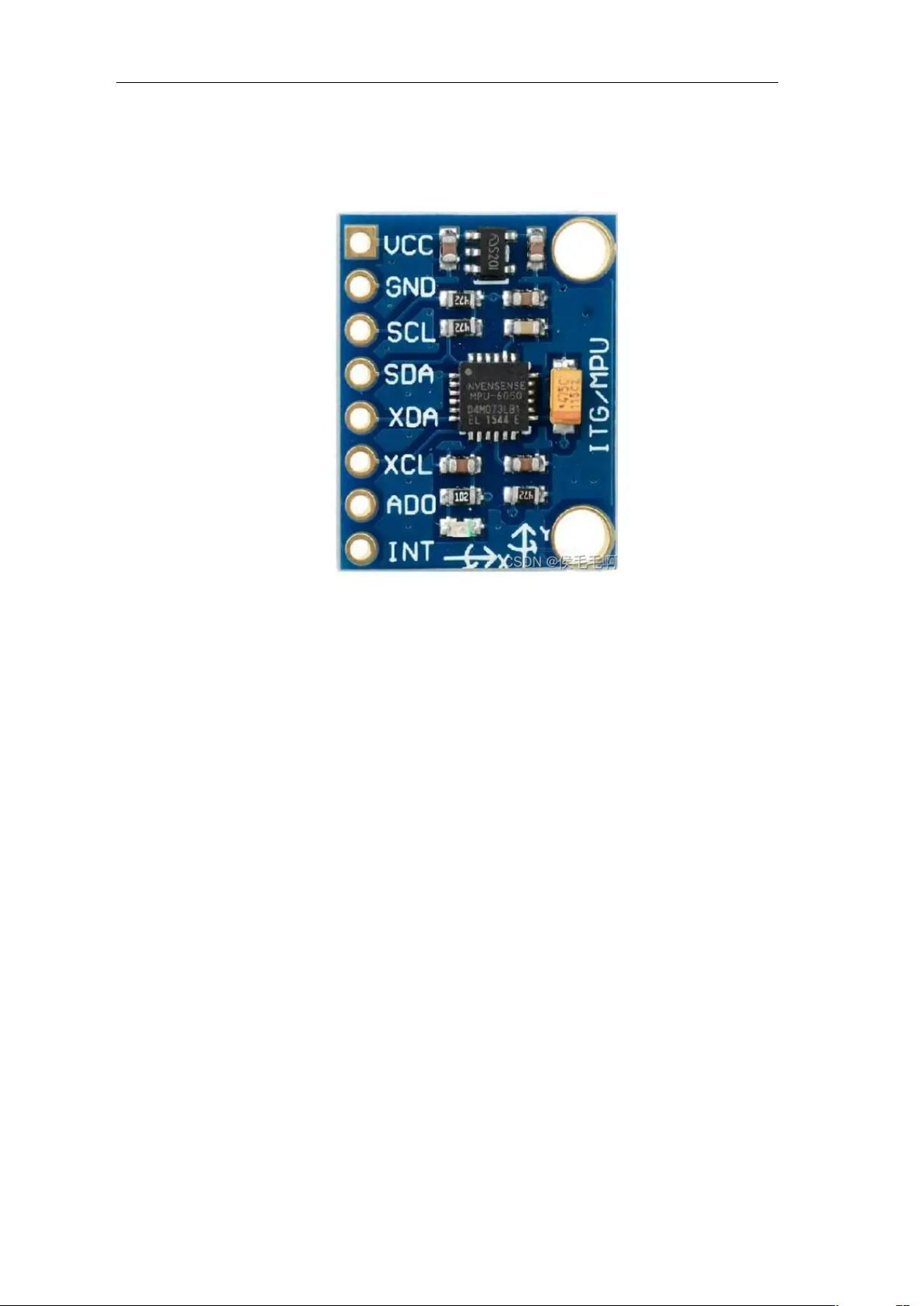
1.2 引脚介绍 .......................................................................................................................2
第 2 章 MPU6050 工作原理...................................................................................................3
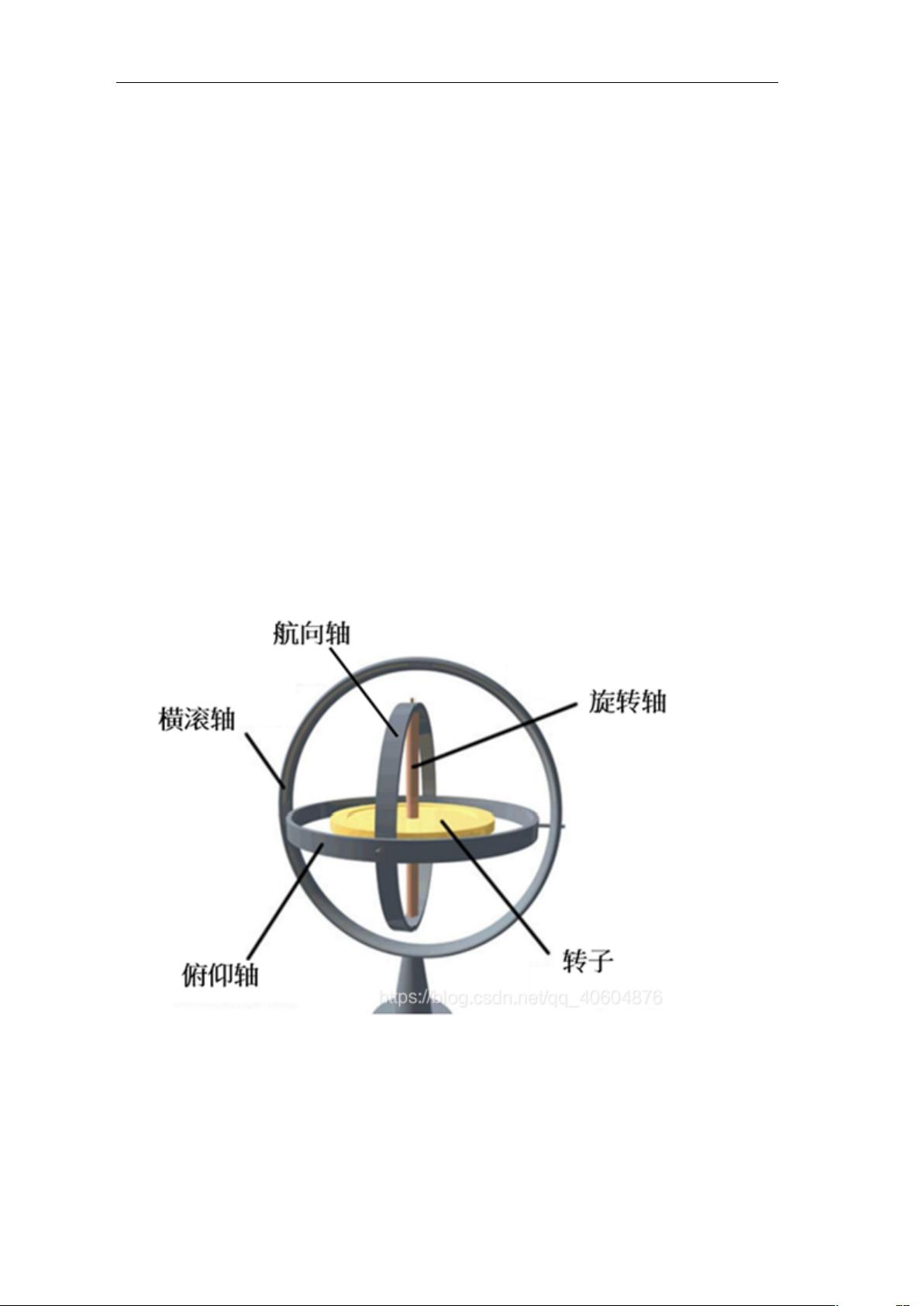
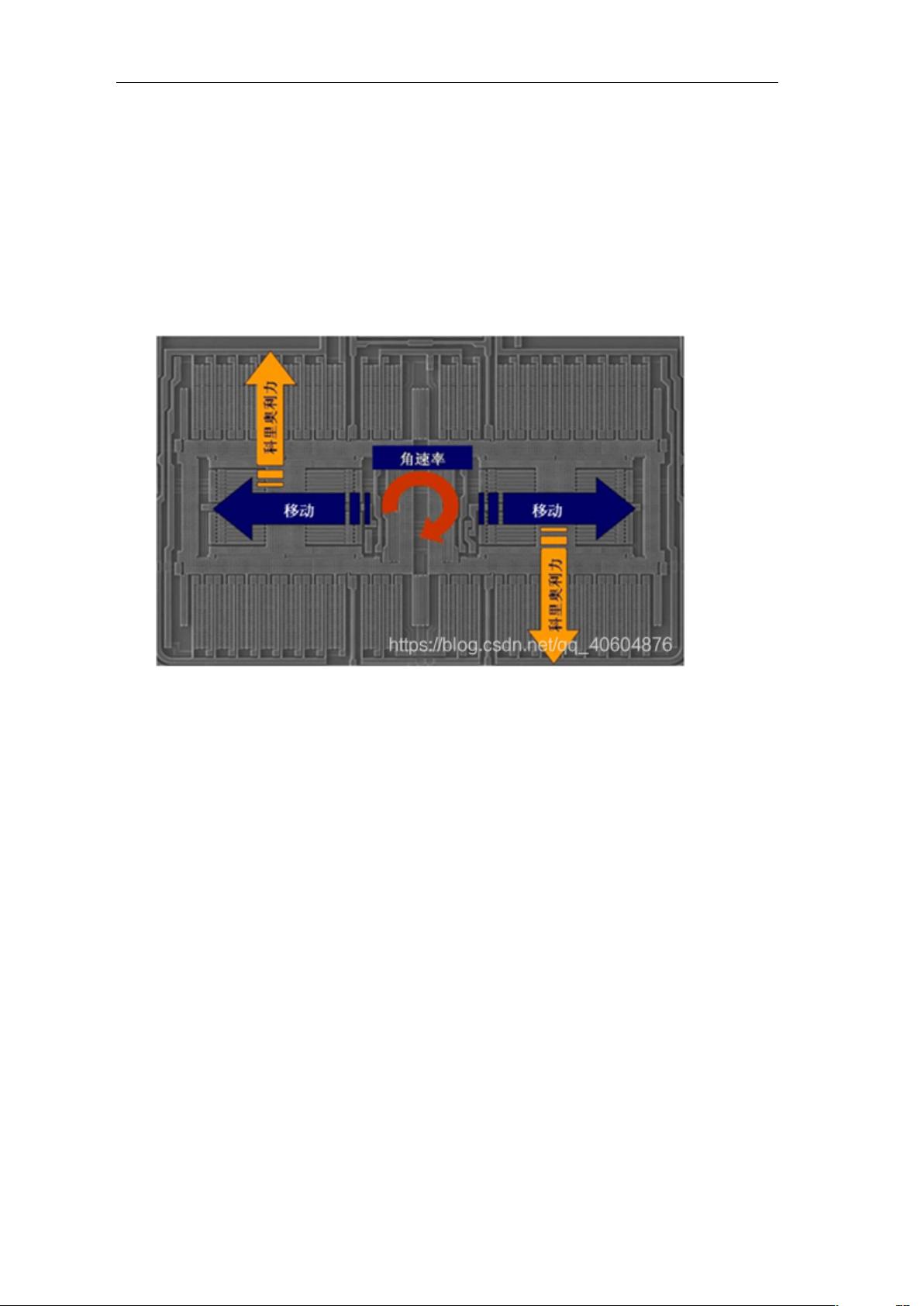
2.1 工作原理 .......................................................................................................................3
2.2 硬件电路 .......................................................................................................................4
2.3 内部框图 .......................................................................................................................5
第 3 章 主控芯片介绍 ............................................................................................................8
第 4 章 IIC 通信协议 ............................................................................................................10
4.1 名词解释......................................................................................................................10
4.2 基本通信时序..............................................................................................................10
4.3 具体通信时序..............................................................................................................11
4.3.1 主设备向从设备发送数据 ...................................................................................11
4.3.2 从设备向主设备发送数据 ...................................................................................12
第 5 章 MPU6050 使用说明.................................................................................................13
5.1MPU6050 寄存器介绍.................................................................................................13
5.2MPU6050 初始化.........................................................................................................16
第 6 章 实验现象 ..................................................................................................................17
6.1 软件模拟 IIC ...............................................................................................................17
6.2 硬件驱动 IIC ...............................................................................................................17
第 7 章 总结与分析 ..............................................................................................................18
附 录.....................................................................................................................................19
附录一 软件模拟 IIC 核心代码 ....................................................................................19
附录二 硬件驱动 IIC 核心代码 ....................................................................................25
剩余30页未读,继续阅读
资源评论


奈奈子0207
- 粉丝: 645
- 资源: 3









最新资源
- 技术资料分享FATFS文件系统的移植很好的技术资料.zip
- 技术资料分享FatFs使用说明-基于SmartARMCortexM3-1700很好的技术资料.zip
- 技术资料分享FATFS浅谈很好的技术资料.zip
- 技术资料分享Fatfs经典资料很好的技术资料.zip
- 技术资料分享FAT32文件系统详解很好的技术资料.zip
- 技术资料分享FAT32简单教材很好的技术资料.zip
- 加强版Claude提示词
- java医院预约挂号平台源码 医院挂号源码数据库 MySQL源码类型 WebForm
- 科目三-自用-静止商用
- JAVA基于SSM的java智能制造系统源码数据库 MySQL源码类型 WebForm
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


