人机交互技术期末设计题

需积分: 0 55 浏览量
更新于2022-12-15
收藏 1.9MB PDF 举报
人机交互技术期末设计题
人机交互技术是指人类和机器之间的交互技术,它涉及到计算机科学、心理学、社会学等多个领域。人机交互技术的目的是为了提高人类和机器之间的交互效率和质量,使得人类能够更加方便、快捷和高效地与机器交互。
根据题目要求,我们需要设计一个机器人,它能够采集核酸样本,并具备一定的智能功能。下面我们将对机器人的设计进行详细的介绍。
机器人示意图
机器人的示意图如下所示:
机器人主要由以下几个部分组成:
* 核酸采集模块:负责采集核酸样本的模块。
* 智能控制模块:负责控制机器人的动作和决策的模块。
* 传感器模块:负责检测环境和人体信息的模块。
* 显示屏模块:负责显示机器人状态和检测结果的模块。
机器人功能
机器人应该具备以下功能:
* 核酸采集功能:能够采集核酸样本,并对其进行检测和分析。
* 智能识别功能:能够识别和检测人体信息,例如身份证信息和个人门铃码。
* 环境检测功能:能够检测环境中的各种因素,例如温度、湿度、照明等。
* 用户交互功能:能够与用户进行交互,例如语音交互、触摸屏交互等。
机器人采集核酸的全过程
机器人采集核酸的全过程可以分为以下几个步骤:
1. 核酸采集:机器人使用采集模块采集核酸样本。
2. 样本处理:机器人对采集到的样本进行处理和检测。
3. 检测结果:机器人将检测结果显示在显示屏模块上。
4. 数据存储:机器人将检测结果存储在数据库中。
身份确认和黄码提示
如果有人没有带身份证或显示不出个人门铃码,机器人可以使用其他方法来确认身份,例如:
* 面部识别技术:使用面部识别技术来识别用户的身份。
* 指纹识别技术:使用指纹识别技术来识别用户的身份。
* 语音识别技术:使用语音识别技术来识别用户的身份。
如果用户的身份确认失败,机器人可以显示黄码提示,以警告用户。
混采(20:1)信息不出错
为了确保混采(20:1)信息不出错,机器人可以使用以下方法:
* 使用错误校验机制:机器人可以使用错误校验机制来检查混采(20:1)信息的正确性。
* 使用数据加密技术:机器人可以使用数据加密技术来保护混采(20:1)信息的安全。
方案优势和改善之处
我们的方案具有以下优势:
* 高效率:机器人可以快速采集核酸样本,并对其进行检测和分析。
* 高准确性:机器人可以使用智能识别技术来识别用户的身份和检测结果。
* 高可靠性:机器人的设计考虑了多种情况和异常情况,能够确保机器人的可靠性。
然而我们的方案也存在一些改善之处,例如:
* 可以使用更多的智能技术来提高机器人的智能化程度。
* 可以使用更多的传感器来检测更多的环境因素。
* 可以使用更多的安全机制来保护机器人的安全。
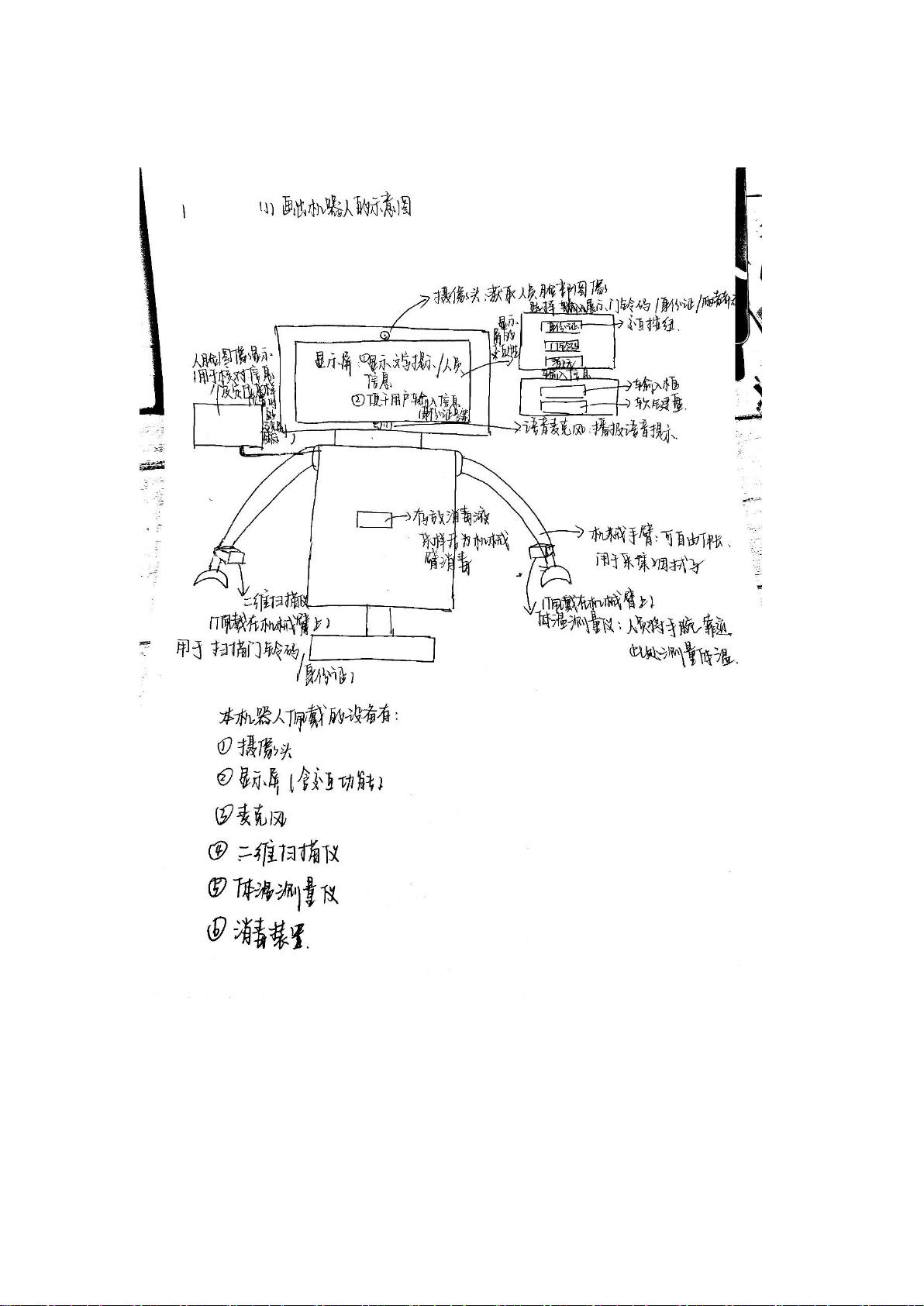
(1)画出机器人的示意图
下载后可阅读完整内容,剩余9页未读,立即下载
189 浏览量
185 浏览量
113 浏览量
2022-05-09 上传
2019-01-04 上传
2023-08-21 上传
162 浏览量
171 浏览量
2024-06-20 上传
150 浏览量
2021-12-12 上传
2021-12-04 上传
2013-05-04 上传
104 浏览量
2021-12-19 上传
130 浏览量
2021-12-22 上传
2023-06-23 上传
182 浏览量
2021-09-27 上传
165 浏览量
资源评论


橙子是唯一的水果yo
- 粉丝: 1
- 资源: 9









最新资源
- 自研DSP28335+移相全桥+纯程序实现同步整流 目前在DSP固有损耗2W的情况下,输出120W效率接近94% 就是铝基板+平面变压器玩起来太贵,不好做小批量,335现在也很贵 基于035的低
- 黏菌优化算法优化用于分类 回归 时序预测 黏菌优化支持向量机SVM,最小二乘支持向量机LSSVM,随机森林RF,极限学习机ELM,核极限学习机KELM,深度极限学习机DELM,BP神经网络,长短时记忆
- 灰狼优化算法优化用于分类 回归 时序预测 灰狼优化支持向量机SVM,最小二乘支持向量机LSSVM,随机森林RF,极限学习机ELM,核极限学习机KELM,深度极限学习机DELM,BP神经网络,长短时记忆
- 麻雀搜索算法优化用于分类 回归 时序预测 麻雀优化支持向量机SVM,最小二乘支持向量机LSSVM,随机森林RF,极限学习机ELM,核极限学习机KELM,深度极限学习机DELM,BP神经网络,长短时记忆
- 模型开发域控制Simulik自动生成代码 DSP2833x基于模型的电机控制设计 MATLAb Simulik自动生成代码 基于dsp2833x 底层驱动库的自动代码生成 MATLAB Simu
- 随机配置网络模型SCN做多输入单输出的拟合预测建模 程序内注释详细直接替数据就可以使用 程序语言为matlab 程序直接运行可以出拟合预测图,迭代优化图,线性拟合预测图,多个预测评价指标 P
- comsol中相场方法模拟多孔介质中驱替的计算案例 提供采用相场方法模拟多孔介质中驱替的算例,可在此基础上学会多孔介质中的驱替模拟,得到水驱油(或其他两相)后多孔介质中的残余油分布,计算采出程度随时间
- 该模型为内置式PMSM的电压反馈弱磁法,转速环输出给定转矩,输出转矩经牛顿迭代数值求的MTPA的最优dq电流,当电压超过直流母线电压时,构建电压闭环输出负的d轴电流进行弱磁扩速
- MATLAB应用数字散斑相关方法计算位移应变p文件资料包(参数可调) 专业性和针对性强
- 光伏控制器,mppt光伏最大功率点跟踪扰动观察法变步长扰动观察法仿真模型
- 基于fpga的半带滤波器仿真程序 1.软件:vivado 2.语言:Verilog 3.具体流程:包括ip核实现版本与非ip核实现版本,包含信号发生,合成,半带滤波器,抽取变频,fifo,fft流程
- 多目标 灰狼算法 多目标 冷热电微网 低碳调度 MATLAB代码:基于多目标灰狼算法的冷热电综合三联供微网低碳经济调度 参考文档:《基于改进多目标灰狼算法的冷热电联供型微电网运行优化-戚艳》灰狼算法
- 电动汽车控制器,纯电动汽车仿真、纯电动公交、纯电动客车、纯电动汽车动力性仿真、经济性仿真、续航里程仿真 模型包括电机、电池、车辆模型 有两种模型2选1: 1 完全用matlab simulink搭
- No.3 纵向速度控制-MPC控制(Carsim2019,Matlab2018a) 特殊说明:如需要电车版本的请咨询 采用上层控制器和下层控制器 目标为控制车辆的纵向速度,使其跟踪上期望纵向速度曲线
- HEV并联(IPS) 车辆仿真 simulink stateflow搭建 模型包含工况路普输入,驾驶员模型,车辆控制模型(CD CS 状态切 以及EV HEV Engine模式转), 电池及电机系统模
- 用信捷XDH总线控制6轴运动,电子凸轮定长切断带折叠,本程序用于一次性床单机,ST加梯形图编写,三期验证时间加密锁
