





A
vailable online at www.sciencedirect.com
Journal of Power Sources 174 (2007) 9–15
Li-ion battery SOC estimation method based on the reduced
order extended Kalman filtering
夽
Jaemoon Lee
∗
, Oanyong Nam, B.H. Cho
School of Electrical Engineering and Computer Science, Seoul National University, Seoul 151-744, Republic of Korea
Received 7 December 2006; received in revised form 26 March 2007; accepted 27 March 2007
Available online 18 April 2007
Abstract
The extended Kalman filter (EKF) method for SOC estimation has some problems such as the lack of an accurate model, and model errors due
to the variation in the parameters of the model due to the nonlinear behavior of a battery. To solve the aforementioned issues, this paper proposes
a reduced order EKF including the measurement noise model and data rejection. In order to do so, the model of a battery in the EKF is simplified
into the type of reduced order to decrease the calculation time. Additionally, to compensate the model errors caused by the reduced order model
and variation in parameters, a measurement noise model and data rejection are implemented because the model accuracy is critical in the EKF
algorithm in order to obtain a good estimation. Finally, the proposed algorithm is verified by short and long term experiments.
© 2007 Elsevier B.V. All rights reserved.
Keywords: State of charge (SOC); Extended Kalman filter (EKF); Reduced order; Li-ion battery
1. Introduction
In recent years, much research has been done to improve the
estimation of the state of charge (SOC), which has increasingly
become an important issue in electric/hybrid vehicle applica-
tions. Ah counting, which is the most common method of
estimating a battery SOC, is easy and reliable. However, it has
problems such as the initial value problem, an accumulated error
problem from incorrect measurements, and no consideration of
the current losses. Open circuit voltage (OCV) for the measure
[5,6,7]. However, it requires a sufficient rest period. To deal
with these problems for Ah counting and OCV, adaptive meth-
ods, such as neural network, fuzzy logic, adaptive observer and
extended Kalman filter (EKF) have been employed, based on
Ah counting, OCV and other factors [1,4,8].Adaptive methods
require an accurate model to obtain good [3,12]. Many states and
factors are necessary to develop the accurate model of a battery.
In general, if states and input factors increase, the calculation
burden also increases. If the number of states in the EKF is n
and the dimension of the measurement vector is /, the compu-
夽
The submitted work was presented at the 4th International Energy Conver-
sion Engineering Conference and Exhibit (IECEC).
∗
Corresponding author. Tel.: +82 2 880 1785; fax: +82 2 878 1452.
E-mail address: jmoonzz@shinbiro.com (J. Lee).
tational complex is (l
∗
(l
2
+ n
2
)) [9]. Therefore, the number of
states and input factors is limited by the processor’s calculation
capability. The battery pack system in the HEV is composed
of many series-connected cells or modules. The BMS (battery
management system) in the HEV should measure the voltages
of each cell or module, the current of the battery, and the temper-
atures in the battery pack. Because the charge/discharge current
in the HEV can be rapidly fluctuated, the period of the algorithm
should be less than 100 ms. Also, SOC estimation algorithm can
be applied to each cell or module of the battery pack. Therefore,
the states in the EKF should be reduced in order to decrease the
calculation time. A trade-off between performance and compu-
tational requirements is likely to be made. Also, the parameters
of the model vary due to the conditions of the battery. Variations
in the parameters of the model cause model errors, which in turn
affect the estimation results.
To solve these problems, this paper proposes a reduced order
EKF implemented by a simple battery model with a measure-
ment noise model and data rejection. Generally, the battery in
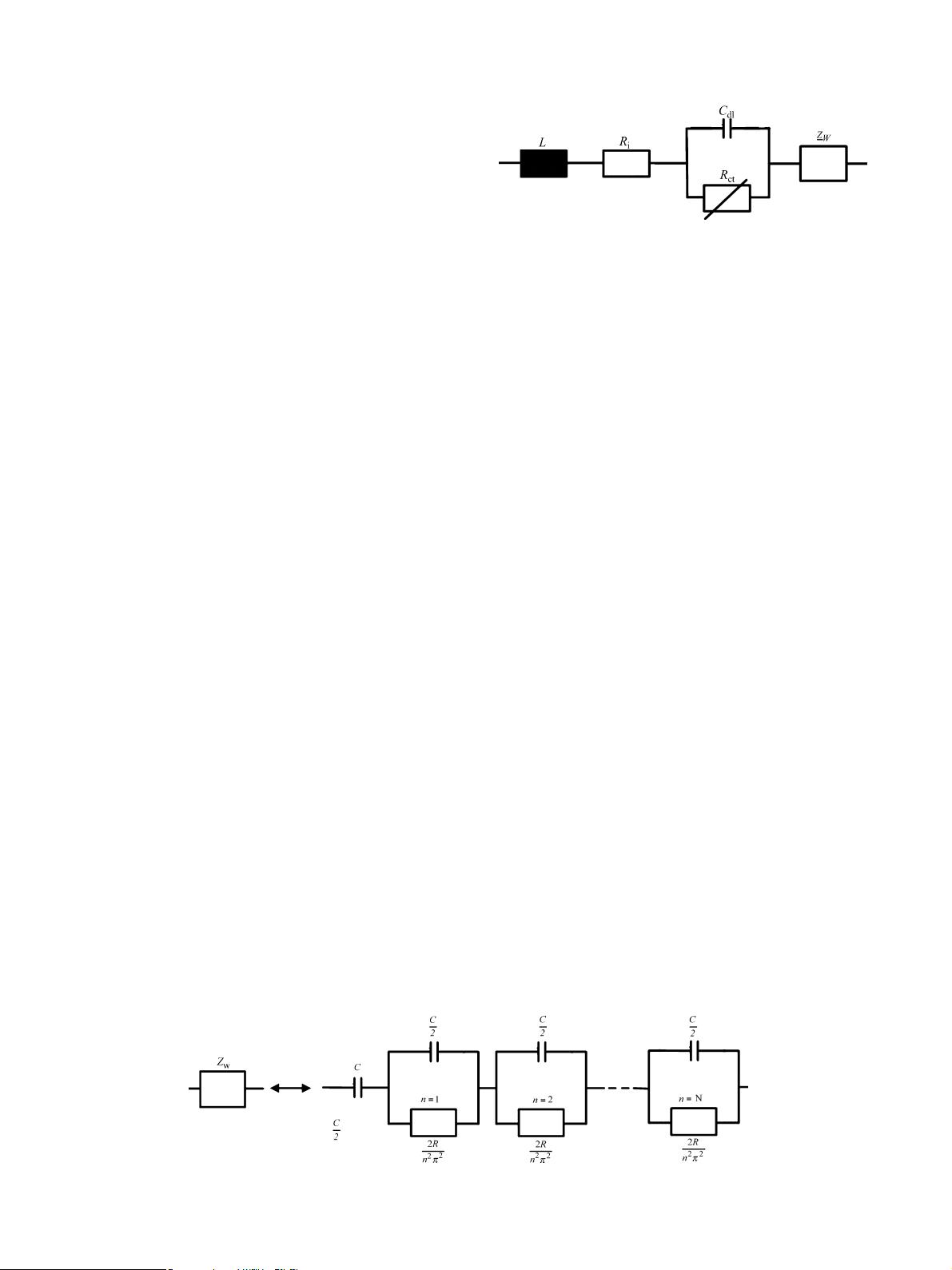
the EKF is represented by an equivalent circuit model based on
its impedance spectrum. It consists of a series resistance, double
layer and charge transfer, and diffusion [2,10,11]. This equiv-
alent circuit model is complex and nonlinear. In the equivalent
circuit model, fast dynamic components can be modeled as a
resistance and, slow dynamics components can be described as
0378-7753/$ – see front matter © 2007 Elsevier B.V. All rights reserved.
doi:10.1016/j.jpowsour.2007.03.072

















- 1
- 2
前往页