

A starlight refraction scheme with single star sensor used
in autonomous satellite navigation system
Hua-ming Qian, Long Sun
n
, Jia-nan Cai, Wei Huang
College of Automation, Harbin Engineering University, Harbin 150001, People's Republic of China
article info
Article history:
Received 1 August 2013
Received in revised form
19 November 2013
Accepted 22 November 2013
Available online 1 December 2013
Keywords:
Autonomous navigation
Stellar refraction
Single star sensor
Star identification
abstract
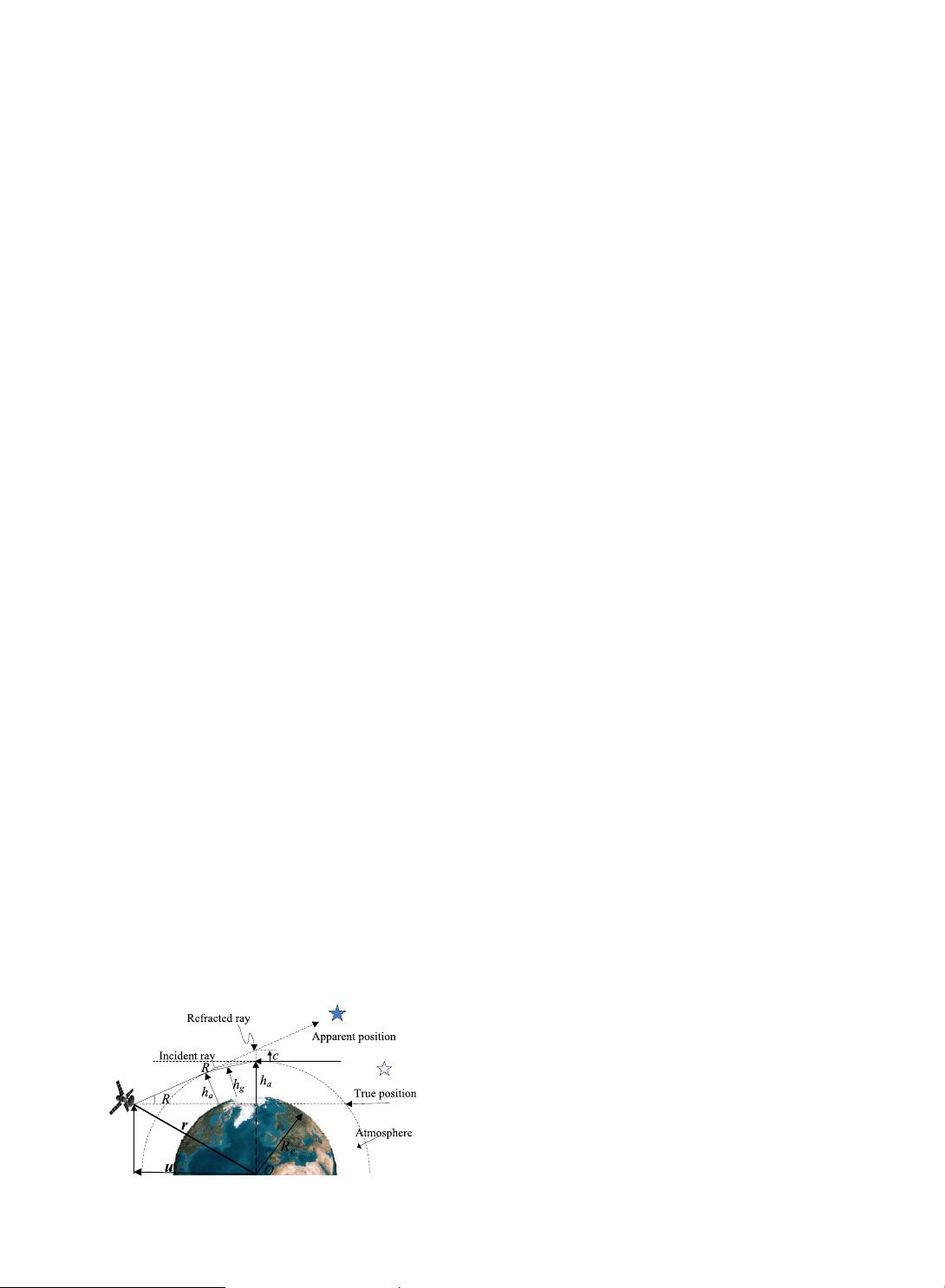
For autonomous satellite navigation, the method based on stellar refraction is studied in
this paper. In the previous studies, two star sensors have been used for navigation.
Actually, only one star sensor is sufficient for navigation. The additional sensor will result
in an extra burden for the initial alignment process and design cost. In this paper, an
autonomous satellite navigation scheme based on stellar refraction with a single star
sensor is presented. The installed angle of star sensor is closely related with the navigation
precision of satellite, and the refraction star identification is crucial in stellar refraction
method. Hence the determination of installed angle and refraction star identification are
also considered. Finally, to verify the feasibility of the proposed scheme, a simulation for
low-Earth-orbit (LEO) satellite is carried out and its result indicates that the proposed
method is practical with high-precision.
& 2013 IAA. Published by Elsevier Ltd. All rights reserved.
1. Introduction
Autonomous satellite navigation is of great interest
among researchers. The celestial navigation system (CNS)
plays an important role in autonomous satellite navigation
system. It is accomplished via obtaining the positional or
attitudinal information by on-board observation, an image
taken from a field of view (FOV), which is manipulated by
the star sensor. The CNS has become an effective autono-
mous navigation system with high-precision attitude
measurement, moreover, the error does not accumulate
with time, and independent wholly. Therefore it is widely
applied to the spacecraft, lunar rover, ballistic missile and
satellite [1–3]. For LEO satellite navigation, the Earth's
horizon is an important reference. According to their mode
of measurement acquisition, satellite celestial navigation
methods fall into two main categories: the direct measur-
ing method and the indirect measuring method by stellar
refraction [4]. The first one has a problem that the high
precision star sensor cannot match the low precision
horizon indicator, resulting in a poor positioning accuracy.
On the contrary, the second uses the star sensors to
indirectly observe the position of Earth's horizon, achiev-
ing a high-precision positioning.
The first study of the refraction method dates back to
the 1960s [5]. During Apollo plan, the Stark Draper
Laboratory (CSDL) investigated many techniques for per-
forming orbit navigation. The refraction method was one
of them. Although it was very attractive, the technique was
not adopted finally [6]. A significant step of the stellar
refraction method was achieved when CSDL conducted
a survey of existing satellites in late 1979 to determine if
any could provide real data on stellar atmospheric refrac-
tion. Finally, the successful observations of refraction were
obtained from OAO-3 (Orbiting Astronomical Observatory)
in 1980 [7]. After that CSDL analyzed many observations
and concluded that high accuracy navigation is possible by
using the refraction method [8,9]. The refraction method
in previous works was not applied in practice until the
MADAN (multi-mission attitude determination and auto-
nomous navigation) system of America was used in the
Contents lists available at ScienceDirect
journal homepage: www.elsevier.com/locate/actaastro
Acta Astronautica
0094-5765/$ - see front matter & 2013 IAA. Published by Elsevier Ltd. All rights reserved.
http://dx.doi.org/10.1016/j.actaastro.2013.11.028
n
Corresponding author.
E-mail addresses: qianhuam@sina.com (H.-m. Qian),
sunlong126@126.com (L. Sun), happycaijianan@163.com (J.-n. Cai),
hangwei@163.com (W. Huang).
Acta Astronautica 96 (2014) 45–52
剩余7页未读,继续阅读






评论0
最新资源