





东北大学秦皇岛分校自动化工程系
课程设计
设计题目:基于单片机的流量控制系统设
计
学生姓名:
专 业:测控技术与仪器
班级学号:
指导教师:闫冬梅
设计时间:2010.6.28-2008.7.11
过程控制系统

东北大学秦皇岛分校自动化工程系
《过程控制系统》课程设计任务书
专业 测控技术与仪器 班级 姓名
设计题目: 基于单片机的流量控制系统设计
一、设计实验条件
过程控制系统实验室实验系统
二、设计任务
1、设计电磁流量计为流量传感器,单片机为核心流量控制系统。系统主要由水泵、水泵
电机、流量传感器、电动阀门、阀门电机、单片机控制系统等组成。
2、写出流量控制过程,绘制控制系统组成框图
3、利用单片机对流量进行控制
(1)系统硬件电路设计
单片机采用 89S52;设计键盘及显示电路,电机控制电路(可控硅,光电耦合器)。
(2)编制流量控制程序
三、设计说明书的内容
1、 设计题目与设计任务(设计任务书)
2、 前言(绪论)(设计的目的、意义等)
3、 主体设计部分
4、 参考文献
5、 结束语
四、设计时间与设计时间安排
1、设计时间: 2 周
2、设计时间安排:
熟悉实验设备、实验、收集资料: 4 天
设计计算、绘制技术图纸: 4 天
编写课程设计说明书: 5 天
答辩: 1 天
一 ,流量控制系统设计意义
工业生产中过程控制是流量测量与仪表应用的一大领域,流量与温度、压力和物位一起统称为过
程控制中的四大参数,人们通过这些参数对生产过程进行监视与控制。对流体流量进行正确测量和调
节是保证生产过程安全经济运行、提高产品质量、降低物质消耗、提高经济效益、实现科学管理的基
础。流量的检测和控制在化工、能源电力、冶金、石油等领域应用广泛。
【
1
】
在天然气工业蓬勃发展的现在,天然气的计量引起了人们的特别关注,因为在天然气的采集、处
理、储存、运输和分配过程中,需要数以百万计的流量计,其中有些流量计涉及到的结算金额数字巨
大,对测量和控制准确度和可靠性要求特别高。此外, 在环境保护领域,流量测量仪表也扮演着重
要角色。人们为了控制大气污染,必须对污染大气的烟气以及其他温室气体排放量进行监测;废液和
污水的排放,使地表水源和地下水源受到污染,人们必须对废液和污水进行处理,对排放量进行控制。
于是数以百万计的烟气排放点和污水排放口都成了流量测量对象。同时在科学试验领域,需要大量的
流量控制系统进行仿真与试验。流量计在现代农业、水利建设、生物工程、管道输送、航天航空、军
事领域等也都有广泛的应用。
二,系统方案
1、方案整体思路
液体流量控制通常采用电动调节阀实现,近年来,电动调节阀的结构和控制方式发生了很大的变
化, 随着计算机进入控制领域,以及新型的电力电子功率元器件的不断出现,使采用全控制的开关
功率元件进行脉宽调制(pulse width modulation ,简称 PWM)控制方式得到了广泛的应用。这种
控制方式很容易在单片机中实现,从而为电动调节阀的控制数字化提供了基础。将 偏差的比例
(proportion)、积分( integral)、微分( dierential)通过线性组合构成数字控制量,构成
数字 PID 控制器,它具有非常强的灵活性,可以根据试验和经验在线调整参数,因此可以得到更好的
控制性能。
本系统采用 C51 系列的 89S52 单片机为核心,通过设置 89S52 单片机的定时器产生脉宽可调
的 PWM 波
【
2
】
,对阀门电机的输入电压进行调制,实现阀门开度的变化,进而实现了对液体流量的
控制。单片机通过电磁流量计采集实际流量信号,根据该信号对其内部采用数字 PID 算法对 PWM 变
量的值进行修改,从而达到对流量的闭环精确控制。
2、实现流程
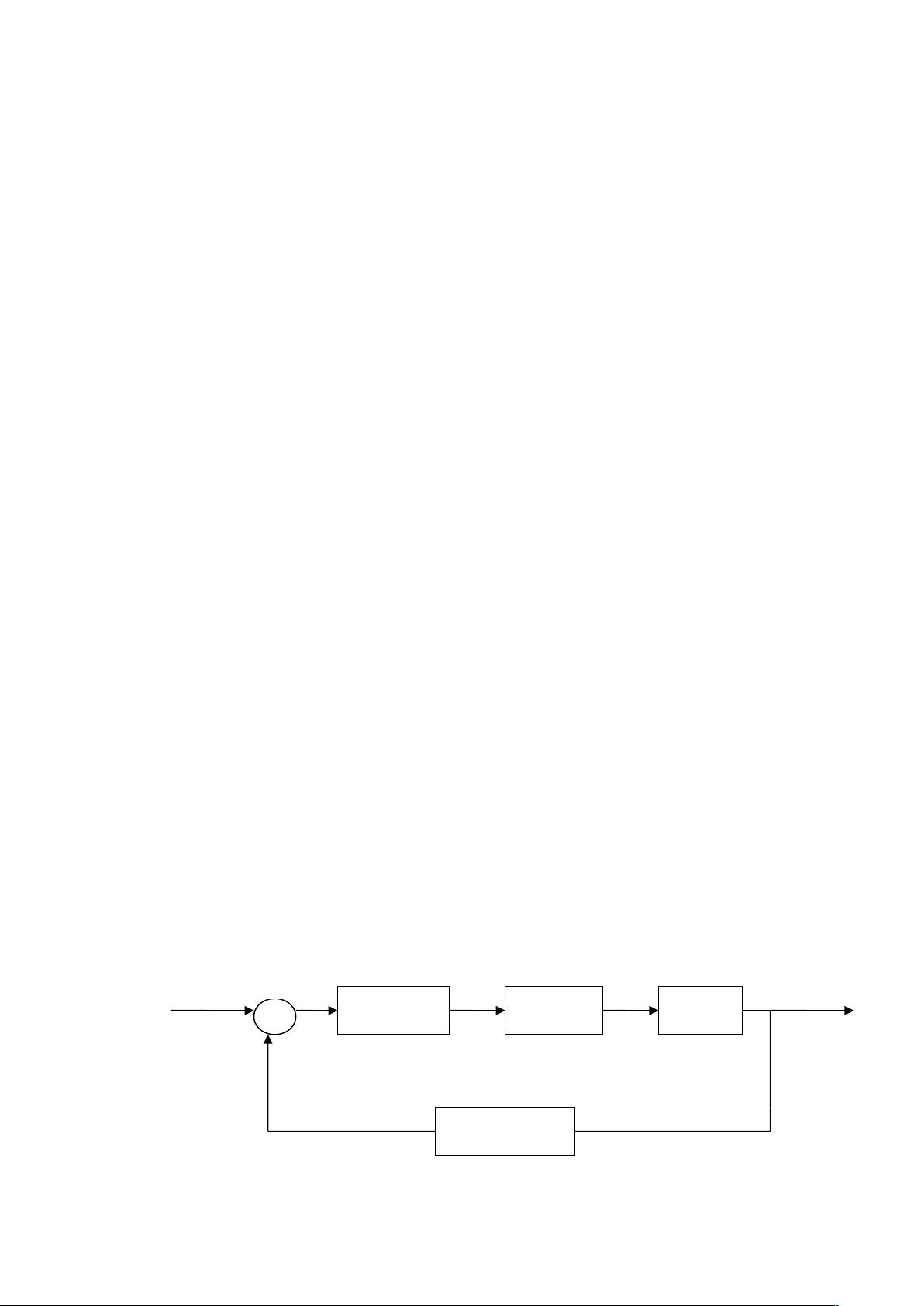
流量控制系统是一个过程控制系统,在设计的过程中,必须明确它的组成部分。过程控制系统
的组成部分有:控制器、执行器、被控对象和测量变送单元,其框图如图 1 所示。
直流电机
PID 控制器
直流电机
PID 控 制
器
阀门
设定值 流量输出
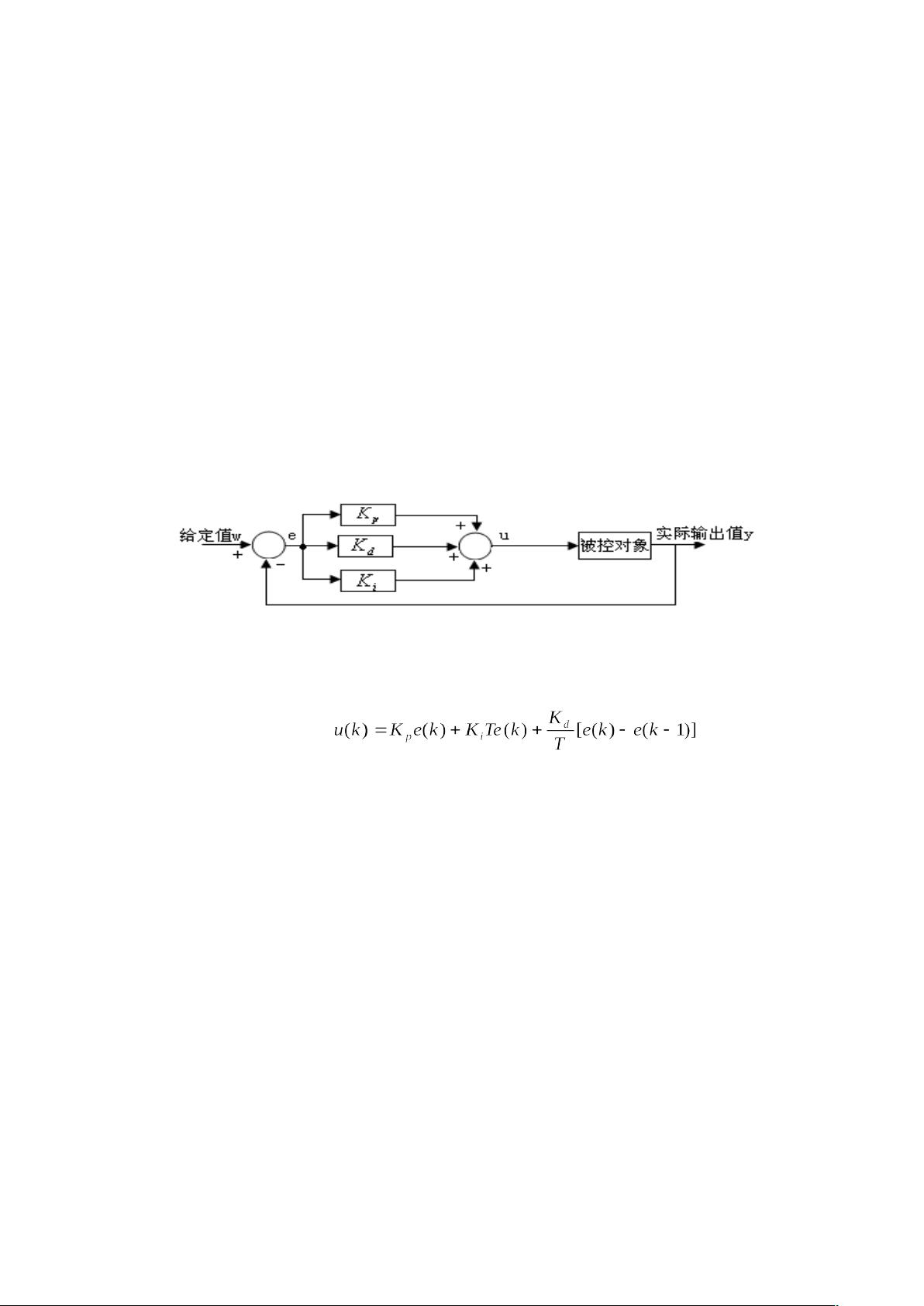
图 1 流量过程控制组成框图
电磁流量计:对输出流量进行检测,并与设定值比较,差值作为控制器的输入。
PID 控制器:对差值进行 P 、I、D 运算,输出对应得模拟量控制电机正反转和转速。
直流电机:根据控制器输出正反转,控制阀门开度增大或减小。
阀门:直接控制流量的执行机构。
所以,在这个系统的设计中,主要设计以上几个部分。除此之外,根据题目要求,还要选取合适
的控制算法来达到满足系统参数的要求。具体就是确定控制器的算法和如何控制阀门开度,因为这两
部分是实现本系统控制目的的关键。它们选取的好坏将直接影响着整个系统实现效果的优劣。
3、控制器算法与 PWM 波形输出
流量是一个普通而又重要的物理量,在许多领域里人们需对它进行测量和控制。本系对流量控
制采用 PID 算法,它具有结构简单、易于理解和实现,且一些高级控制都是以 PID 为基础改进的。
在工业过程控制中 90%以上的控制系统回路具有 PID 结构,
图 2 PID 控制原理框图
PID 调节器的离散化表达式为
比例调节的作用是使调节过程趋于稳定,但会产生稳态误差;
积分作用可消除被调量的稳态误差,但可能会使系统振荡甚至使系统不稳定;
微分作用能有效的减小动态偏差。
PWM 波形输出:用 89S52 单片机的定时器 0 和定时器 1 交替工作,产生连续的与偏差大小有关
的占空比可调的 PWM 波形。首先,定时器 0 定时时间到,产生中断,置位 PWM 输出口并开启定时
器 1,定时器 1 定时期间 PWM 输出高电平,且定时器 1 的定时时间可调,与偏差的 PID 运算结果有
关,所以能输出占空比变化的 PWM 波,控制电机转动,进而控制阀门开度和流量。
三、系统硬件设计
1、总体设计框图及说明
本系统是一个简单的单回路控制系统。为了实现流量的自动测量和控制,采用了 89S52 单片机作
为系统的控制中心,由数据采集模块检测到的流量信号传入单片机,并根据接收到的数据进行处理和
控制运算,同时将数据保存,以便与下一次采样值进行比较,根据系统程序控制,进行 PID 运算以及
PWM 输出控制电机转速,最终由 CPU 控制电机正反转,达到调节流量的目的。系统还具有键盘设定
模块,便于用户与系统之间的对话。系统的硬件结构较简单,由若干个功能模块组成。具体结构图图
3 及说明如下,
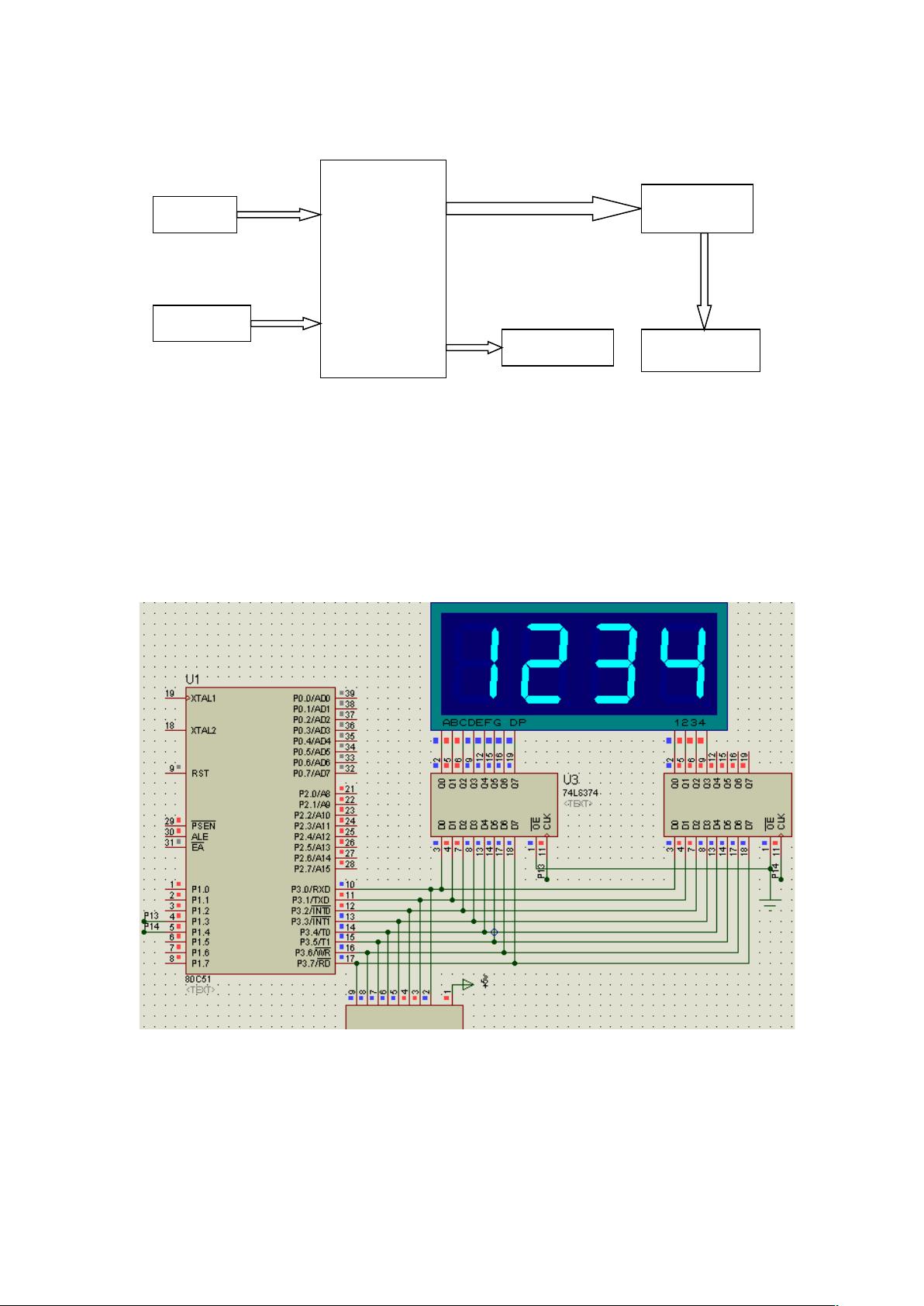
图 3 功能模块结构图
键盘设定:设定控制系统要求的流量大小。
数据采集:用滑动变阻器分压模拟流量大小。
直流电机:接收单片机的控制信号进行正反转和转速调节,带动阀门转动。
2、部分外部电路设计
2.1 数码管显示电路
采 用 四 联 排 共 阴 极 数 码 管 进 行 显 示 , 具 有 四 位 数 码 管 , 这 四 个 数 码 管 的 段 选
a、b、c、d、e、f、g 分别接在一起,每一个都拥有一个共阴的位选端。P3 口控制数码管的点亮情
况。因为单片机的 IO 口输出功率有限,需要使用 74LS374 芯片进行锁存。此外还用一个电阻 R-
PACK8 来保护 LED。
2.2、直流电机控制电路
89S52
单片机
键盘
数据采集
直流电机
阀门
数据显示














