自动驾驶-状态估计和定位之无迹卡尔曼滤波UKF实操.pdf
需积分: 0 138 浏览量
2024-04-25
19:26:30
上传
评论
收藏 1.44MB PDF 举报


1 / 13
Unscented Kalman Filter
是
解
决
⾮
线
性
卡
尔
曼
滤
波
的
另
⼀
种
思
路
,
它
利
⽤
Unscented
Transform
来
解
决
概
率
分
布
⾮
线
性
变
换
的
问题
。
UnScented Kalman Filter
不
需
要
像
Extended
Kalman Filter
⼀
样
计
算
Jacobin
矩
阵
,
在
计
算
量
⼤
致
相
当
的
情
况
下,
能
够
获
得
更
加
精
确
⾮
线
性
处
理
效
果
。
附
赠
⾃
动
驾驶
学
习
资
料
和
量
产
经
验
:
链
接
1.UnscentedKalmanFilter
的
思
想
逼近
概
率
分
布
要
⽐
逼近
任
意
的
⾮
线
性
函
数
要
容
易
的
多
,
基
于
这
种
思
想
,
Unscented Kalman
Filter
利
⽤
概
率
分
布
逼近
来
解
决
⾮
线
性
函
数
逼近
的
问题
。
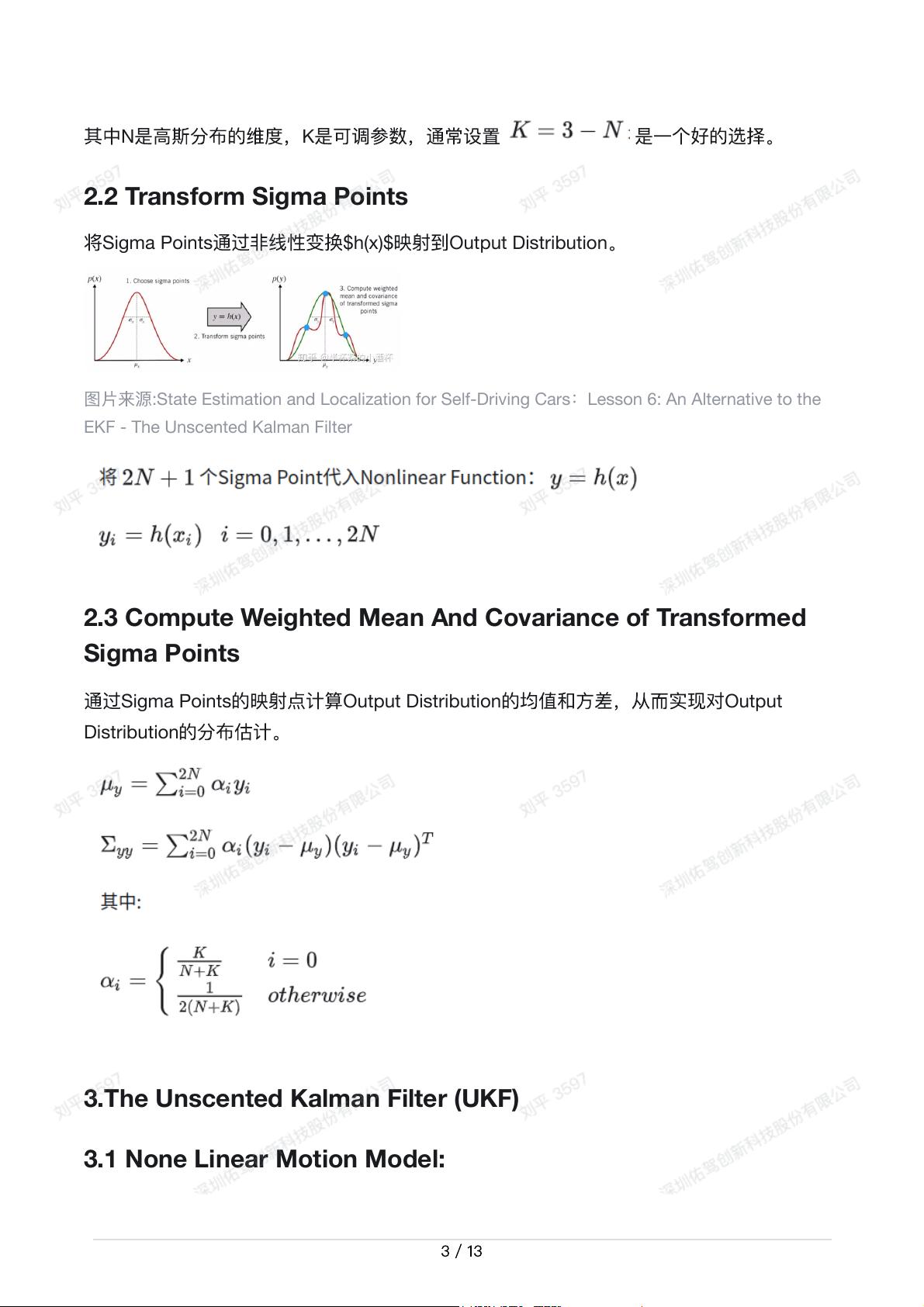
以
⼀
维
的
⾼
斯
分
布
为例
,
如
下
图
所
示
,
左
侧
是
⼀
维
⾼
斯
分
布
,
ℎ(x)
是
⾮
线
性
变
化
,
右
侧
是
变
换
后
的
⾼
斯
分
布
。
图
⽚
来
源
:State Estimation and Localization for Self-Driving Cars
:
Lesson 6: An Alternative to the
EKF - The Unscented Kalman Filter
左
侧
的
⾼
斯
概
率
分
布
参
数
是
已
知的
,
也
是
已
知
;
如
何估
计
⾮
线
性
变
换
后
的
分
布
呢
?
Unscented Transform
提
供了
这
样
⼀
种
对
变
换
后
的
概
率
分
布
的
估
计
⽅
法
。
2.UnscentedTransform
Unscented Transform
的
流
程
如
下
:
⾃
动
驾驶
-
状
态
估
计
和
定
位之
⽆
迹
卡
尔
曼
滤
波
U
KF
实
操
it is easier to approximate a probability distribution than it is approximate an arbitary
nonlinear function.

剩余12页未读,继续阅读
资源评论













