
2020 年 TI 杯大学生电子设计竞赛
坡道行驶电动小车(C 题)
1. 任务
利用 TI 的 MSP430/MSP432 平台,设计制作一个四轮电动小车。要求小车
能沿着指定路线在坡道上自动循迹骑线行驶。小车必须独立运行,车外不能使用
任何设备(包括电源)。小车(含电池)重量小于 1.5kg,外形尺寸在地面投影不
大于 25cm×25cm。坡道用长、宽 约 1m 的细木工板制作,允许板上有木质本色及
自然木纹。木工板表面铺设画有 1cm×1cm 黑白间隔的纸条(以下简称为标记线)
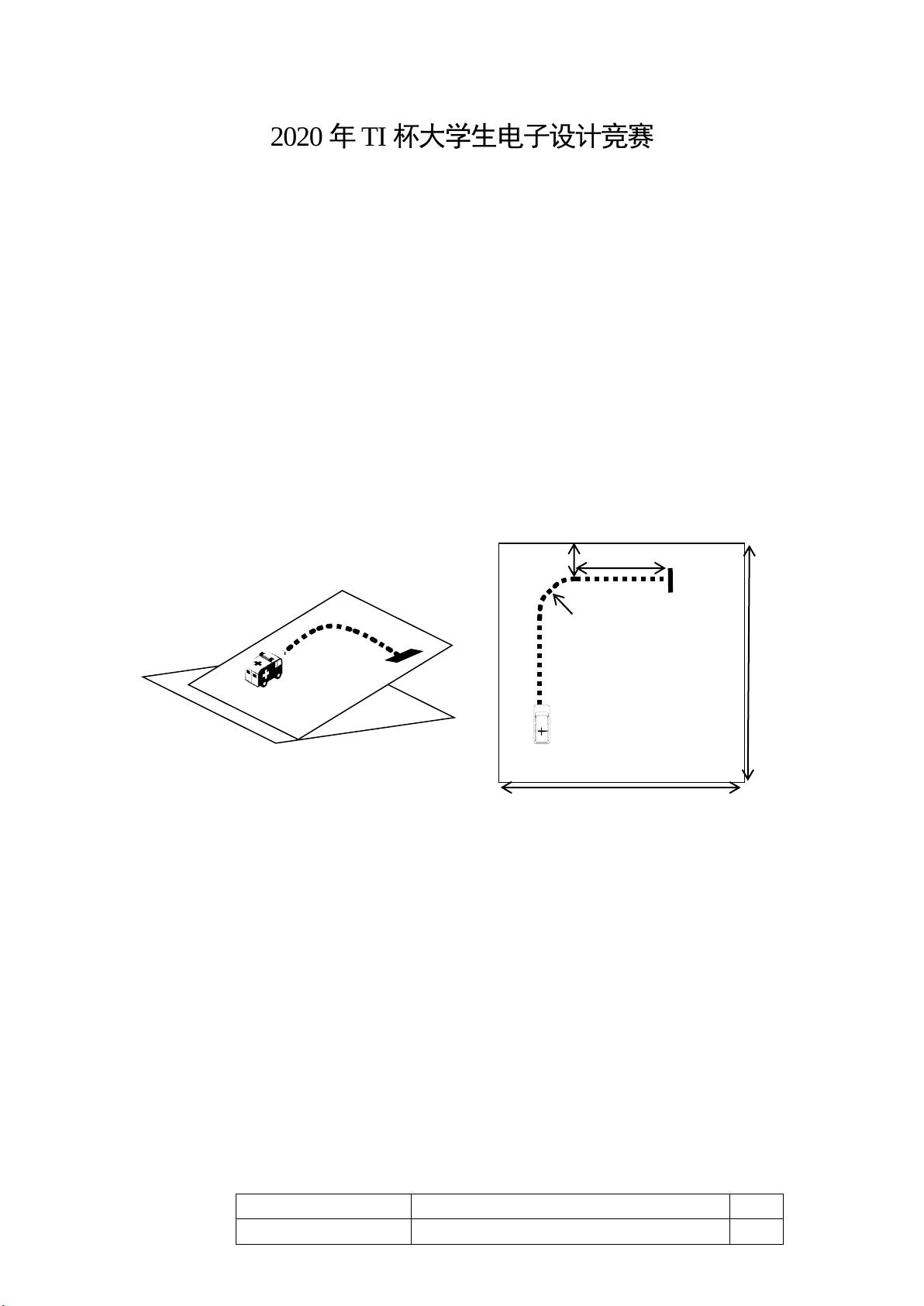
作为路线指示;标记线起始段为直线,平行于木板两边;标记线在坡顶转向 90°,
转弯半径 20cm;标记线平行坡顶距离≥30cm,距坡顶距离≤20cm;标记线总长
度为 1m。停车标记为宽 1cm 长 5cm 的黑色线条,垂直于坡顶标记线。小车坡度
角示意及行驶线路顶视图如图 1 所示。
图 1 小车坡道角示意及行驶线路顶视图
2. 要求
(1) 坡度角 θ=0°,电动小车能够沿标记线自动骑线行驶,在停车点停车;
小车上标记点到停车标记中心线的垂直距离误差≤2cm。停车时立即发
出声音提示。小车行驶过程中,其地面投影不得脱离标记线。 (15 分)
(2) 在完成(1)的基础上,电动小车能够设定行驶时间,自动控制小车匀
速通过 1 米长的线路,在停车点停车。行驶时间可在 10s~20s 间设定。
误差绝对值≤1s。行驶过程中不得碾压、脱离标记线。时间误差每超过
1s 扣 1 分。 (20 分)
(3) 坡度角 θ=10°,完成要求(2)的动作。 (20 分)
(4) 可任意指定坡度角 θ 在 11°~30°,完成要求(2)的动作。 (20 分)
(5) 在完成(4)后,尽量增加坡度角 θ,完成要求(2)动作。 (20 分)
(6) 其他。 (5 分)
(7) 设计报告: (20 分)
项 目
主要内容
满分
方案论证
比较与选择,方案描述
3
坡度角 θ
停车标记
≥30cm
≤20cm
R=10~20cm
m
1m
1m
坡道底部
资源评论


CV视界
- 粉丝: 2w+
- 资源: 525









最新资源
- 声音数字化通常涉及将模拟声音信号转换为数字信号
- 2025蛇年表情包-zip打包文件
- 草莓采摘机器人中基于HOG和支持向量机的重叠草莓检测方法
- 西门子plc与C#上位机通讯 界面WPF开发 基于S7netpuls库,自定义了S7netpulsHelper库,封装了一个新方法,WriteReadClass(),实现了对西门子DB块的读写操作,p
- WSL批量压缩MP4文件对应Shell脚本文件
- 基于支持向量机的面部识别特征提取算法研究
- 基于Matlab对MIMO通信系统中的3大部分-空时编码、系统容量、信道估计进行仿真分析项目源码-毕设
- “衣橱智能化”:构建高效的穿戴搭配平台
- simpack,铁路车辆建模资料 380带齿轮箱和不带齿轮箱两种(默认不带齿轮箱)
- JetBra-2021.1.x-重置.mp4.zip
- 基于Matlab对MIMO通信系统中的3大部分-空时编码、系统容量和信道估计进行仿真分析源码+说明(高分毕设)
- Python编程 一个简单的注册程序,利用数据库进行注册界面设计
- 导弹六自由度运动模型, MATLAB Simulink模型,导弹模型
- 跨年烟花源代码html/烟花代码大全html/跨年烟花源代码(2025跨年烟花代码html)
- 麦克风阵列声源定位相关算法matlab源码(高分项目).zip
- 糖果盒子2.4.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


