第40卷 第8期 2018-08 【131】
基于STM32和ARM Cortex-A8
平台的自清扫智能小车设计
Design of self-cleaning intelligent vehicle
based on STM32 and ARM Cortex-A8
任金波
1,2
,
张 翔
1
,
施火结
1
REN Jin-bo
1,2
, ZHANG Xiang
1
, SHI Huo-jie
1
(
1.福建农林大学 机电工程学院
,
福州 350002
;
2.重庆大学 机械工程学院
,
重庆 400044
)
摘 要:
针对路面边缘排水槽清理难、转弯处清理容易损坏毛刷盘等问题,设计出一种基于STM32和
ARM Cortex-A8平台的集行走、控制、图像识别与路径检测、水槽清扫、集尘等多功能于一
体的自清扫小车。根据实际应用要求,完成了自清扫小车的机械结构和控制系统设计,并进
行了图像处理和运动仿真实验,结果表明:图像识别与路径检测系统处理一副500×360像素
的图像平均耗时仅需0.082s,可实时检测到路面和排水槽清扫路径,且在复杂路面上可保持
稳定运动,从而有效引导自清扫小车对路面边缘排水槽进行自动清扫。
关键词:
自清扫;智能小车;图像处理;路径检测
中图分类号:
TP23
文献标识码
:A
文章编号:
1009-0134(2018)08-0131-04
收稿日期:2018-03-14
基金项目:
福建省教育厅项目
(
1114s1205
);
福建农林大学机械工程学科水平提升计划项目
(
612014049
)
作者简介:
任金波
(
1982
-
),
男
,
湖北随州人
,
实验师
,
博士研究生
,
研究方向为机械振动
、
优化设计及计算机应用
。
0 引言
近年来,随着经济的发展和生活水平的提高,人
们对路面的铺装要求越来越高,尤其是广场、公园、庭
院、小区等道路,广泛使用大理石、花岗岩、砂石、混
凝土砖及其他材料铺装路面,沿路面两侧边缘常设有排
水槽,因排水槽宽度和高度较小,受落叶、石粒、杂草
等影响经常容易堵塞,给排水带来严重影响,而清理时
又极为困难,目前主要靠人工手工清理作业,劳动强
度大,如能以自动清扫设备进行作业,将能显著提高
清理效率,降低劳动强度。本文提出一种基于STM32
和ARM Cortex-A8平台的自清扫智能小车,能在以大理
石、花岗岩、混凝土砖等进行铺装的路面对边缘排水槽
进行清扫,清扫时可对路面和排水槽进行精确定位,自
动控制毛刷盘位置来配合小车的行走动作,沿排水槽自
动完成清扫作业。
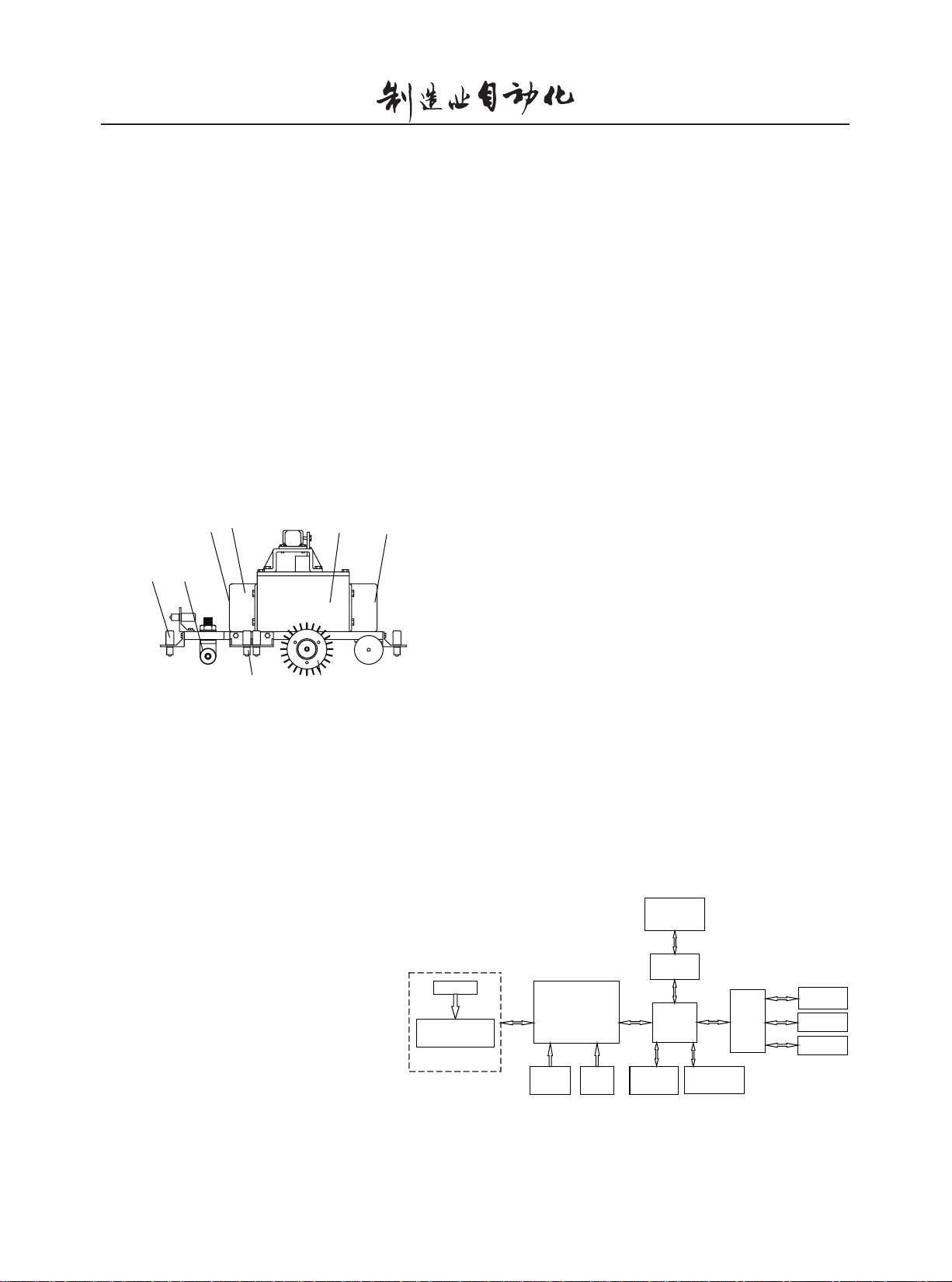
1 系统总体设计
1.1 功能设计
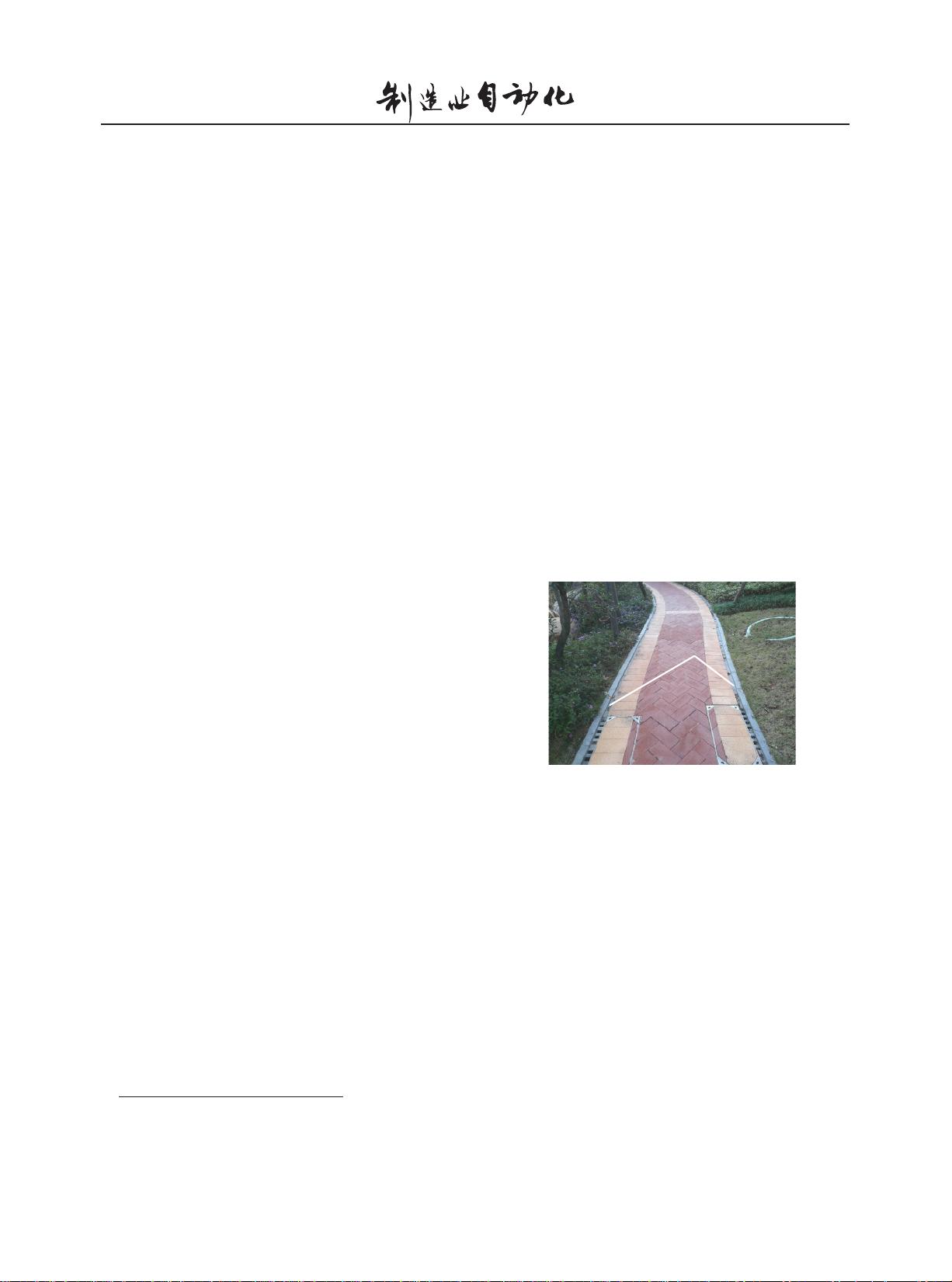
路面边缘排水槽如图1所示,宽度约42mm,高度约
16mm,常有落叶、淤泥、石粒等落入其中造成堵塞,
基于STM32和ARM Cortex-A8的自清扫智能小车,通过
安装于底盘前后端的摄像头采集路面图像,并进行路径
检测以指导行走机构运动,左右端的摄像头采集排水槽
图像,在控制模块作用下,清扫小车在尺寸较规整的路
面上对边缘排水槽进行清扫。控制模块内置包括STM32
单片机在内的计算芯片,当小车工作时,计算芯片以小
车初始位置为原点,以收到的ARM Cortex-A8平台传送
的路面图像为刻度,记录小车的行走轨迹,并在转弯处
或交叉处判断转向以免重复之前的路径;行走机构根据
路面图像信息处理结果实时调整行进路线,以使毛刷盘
对准排水槽进行清扫,当行走机构转弯、倒退或暂停
时,升降单元提升毛刷盘使之离开缝隙以免受损。
图 1 路面边缘排水槽
排水槽
图1 路面边缘排水槽