doi:10.16169 / j.issn.1008
-
293x.k.2019.08.009
六自由度机械臂的建模与 MATLAB 仿真
马宗家
1
石松泉
2
(1 绍兴文理学院 土木工程学院ꎬ浙江 绍兴 312000ꎻ2 绍兴文理学院 机械与电气工程学院ꎬ浙江 绍兴 312000)
摘 要:针对六轴机械臂的运动特性ꎬ使用 D
-
H 法创建各关节坐标系ꎬ求得其参数ꎬ并推导出正逆运
动学方程.使用 MATALB Robotics 工具箱创建该机械臂的仿真模型ꎬ对其正逆运动、轨迹规划进行仿真.通
过仿真ꎬ在关节空间规划下ꎬ求得机械臂模型运动过程中各关节参数随时间变化的关系图.在笛卡儿空间规
划下ꎬ得到了机械臂末端的直线运动轨迹.通过对比理论数据和仿真结果ꎬ验证机械臂模型建立的正确性及
正逆运动公式的准确性.
关键词:机械臂ꎻ正逆运动学ꎻ轨迹规划ꎻMATLAB 仿真
中图分类号:TP241.2 文献标志码:A 文章编号:1008
-
293X(2019)08
-
0050
-
05
收稿日期:2019
-
05
-
21
作者简介:马宗家(1996— )ꎬ男ꎬ浙江衢州人ꎬ绍兴文理学院土木工程学院在读硕士研究生ꎬ研究方
向:建筑施工机械与设备.
随着机器人技术的发展ꎬ机器人在许多行业
有着广泛的应用.砌墙机器人作为建筑行业的新
型设备ꎬ受到许多的科研人员的探索和研究. 而
机械臂作为机器人的执行部件ꎬ同样也是机器人
课题研究中重要部分
[1]
.其中ꎬ串联机械臂是应
用最为广泛的机械臂ꎬ它是通过多个关节连接若
干个连杆组成的一种具有多自由度的机制
[2]
.为
了了解机械臂关节和连杆之间的运动规律ꎬ探究
机械臂各部位之间的位姿关系ꎬ需要对其进行运
动学分析.通过机械臂的运动状态可以将其分为
正运动和逆运动ꎬ正运动则是在确定机械臂的初
始参数(连杆转角、连杆偏距、连杆长度)ꎬ通过
关节角得到末端关节相对基坐标系的位姿ꎬ逆运
动则是通过末端执行器的位姿来求得机械臂各
关节角的参数信息
[3]
.为了得到机械臂一般运动
规律并减少设计周期ꎬ于是使用 MATLAB 对其
进行建模ꎬ快速完成运动学分析及路径规划ꎬ为
建筑 机 器 人 在 实 际 作 业 中 提 供 了 理 论 数 据
支撑
[4]
.
1 机械臂 D
-
H 模型的建立
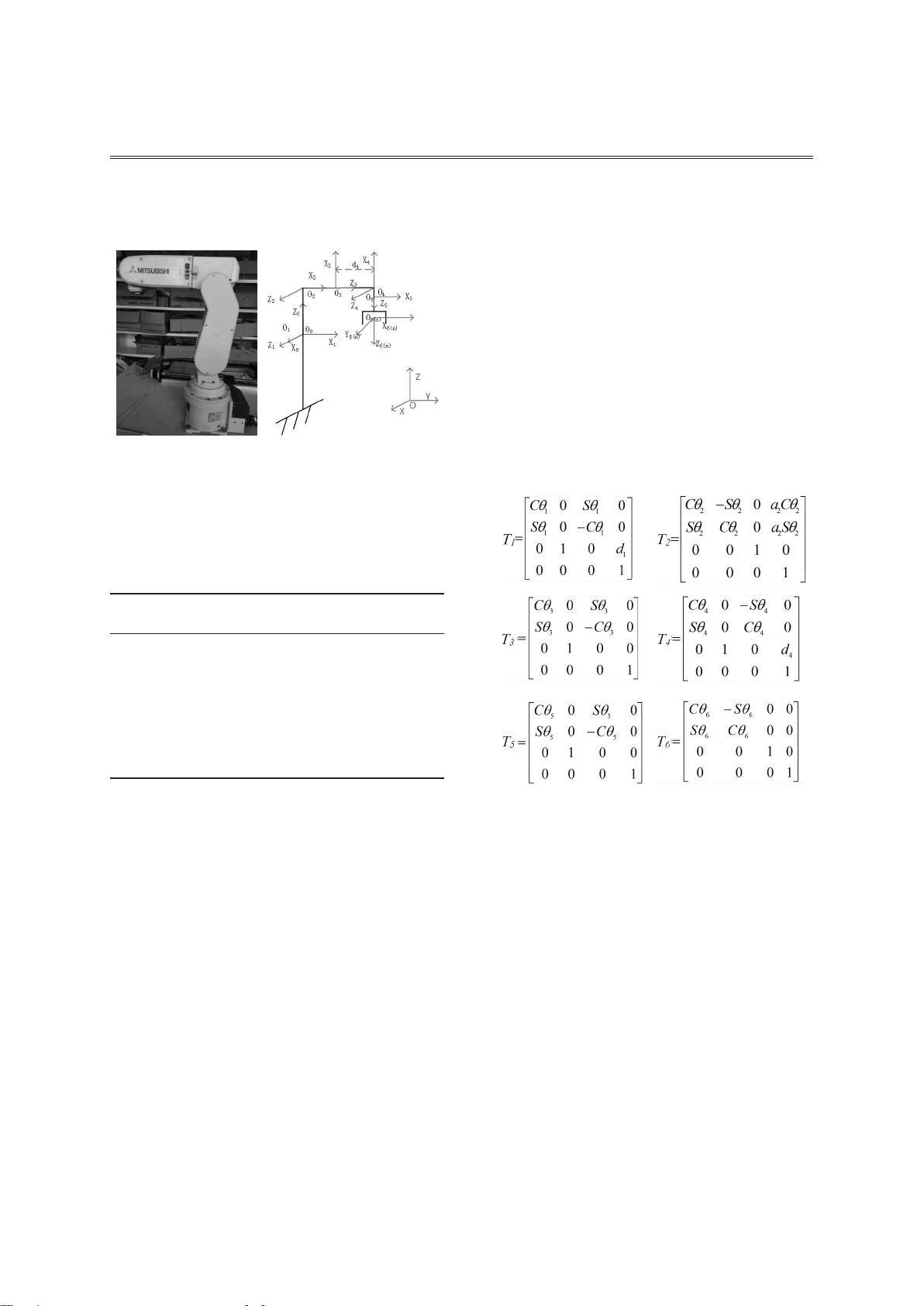
本文研究的对象是拥有 6 个旋转关节的机
械臂
[5
-
6]
ꎬ即 6 自由度机械臂.图 1 为三菱六轴机
械臂的实物结构图ꎬ根据此类机械臂的特性ꎬ采
用 D
-
H 参数法在各关节上建立 D
-
H 坐标系ꎬ得
到机械臂 D
-
H 模型
[7]
ꎬ完整的关节坐标系模型
如图 2 所示ꎬ其中是基坐标系的原点 o
0
和第一关
节坐标系原点 o
1
相重合.图中 D
-
H 坐标系建立
的步骤如下:
(1)坐标系 z
i
-
1
的方向和机械臂关节 i 的轴
向方向一致.
(2)坐标系 x
i
的方向则是由相邻 z
i
和 z
i
-
1
的
第 39 卷 第 8 期
2019 年 8 月
绍 兴 文 理 学 院 学 报
JOURNAL OF SHAOXING UNIVERSITY
Vol 39 No 8
Aug 2019