【104】 第41卷 第8期 2019-08
基于MATLAB的HP20D
机器人运动学分析与仿真
Kinematics analysis and simulation
of HP20D robot based on MATLAB
马国庆
,
刘 丽
,
于正林
,
曹国华
,
范师杰
MA Guo-qing, LIU Li, YU Zheng-lin, CAO Guo-hua, FAN Shi-jie
(
长春理工大学 机电学院
,
长春 130022
)
摘 要:
以安川HP20D六自由度关节式机器人为研究对象, 通过经典D-H法对其进行运动学分析,并用
MATLAB进行了运动学的仿真与方程计算,通过数据对比分析验证了其运动学模型与运动学
正逆运算的正确性。为机器人进行轨迹规划研究与仿真提供了必要的理论基础和正确的运动
学模型。
关键词:
机器人;运动学;MATLAB
中图分类号:
N34
文献标识码
:A
文章编号:
1009-0134(2019)08-0104-04
收稿日期:2018-09-04
基金项目:
吉林省科技发展计划资助项目
(
20160204016GX
,
20180623031TC
);
吉林省省级产业创新专项资金资助
项目
(
2016C088
,
2017C045-2
);
长春理工大学青年科学基金
(
XQNJJ-2016-04
,
XQNJJ-2017-11
);
吉
林省教育厅十三五科学技术项目
(
JJKH20170626KJ
)
作者简介:
马国庆
(
1988
-
),
男
,
讲师
,
博士
,
研究方向为光传感测量
。
0 引言
机器人的运动学分析是机器人学的一个重要组成部
分,为机器人的动力学分析、轨迹规划和运动控制提供
重要依据
[1]
。本文使用经典D-H法对HP20D型六自由度工
业机器人进行运动学分析,并用MATLAB进行运动学的
仿真与方程计算,通过数据对比验证了其运动学模型与
运动学正逆运算的正确性。为机器人进行轨迹规划研究
与仿真提供了必要的理论基础和正确的运动学模型。
1 机器人结构分析及数学模型建立
1.1 结构分析
工业机器人主要由机身主体、驱动系统和控制系统
三部分组成
[2]
。机身主体即机座与执行机构,包括臂
部、腕部和手部;驱动系统涵盖动力装置与传动机构,
负责为机身主体提供动力输出与传输;控制系统负责按
照输入的命令及程序对驱动系统与执行机构发出信号,
并进行控制
[3]
。工业机器人的有效工作范围、重复定位
精度、荷载以及允许扭矩是评判机器人工作能力的重要
参数。HP20D型工业机器人为六自由度垂直多关节型机
器 人 , 末
端 最 大 负 载 为 2 0 k g , 重 复 定 位 精 度 为
±
0.06mm,但由于机器人制造导致的模型误差和日常工
作产生的磨损,其定位精度在几毫米左右,可以通过标
定技术来提高精度
[4]
。
1.2 机器人数学基础
机器人可简化成由一系列杆件串联而成,将坐标系
置于每一连杆的关节中心处,则可用齐次坐标变换对这
些坐标系之间的位姿进行数学表述
[5]
。
1.2.1 工业机器人的位姿描述
1)位置描述
在空间直角坐标系{A}中的任意一点P的位置可用
一个(3×1)的位置矢量
A
P来表示:
(1)
其中,p
x
、p
y
、p
z
为点P的三个位置坐标分向量,
A
P
称为位置矢量。
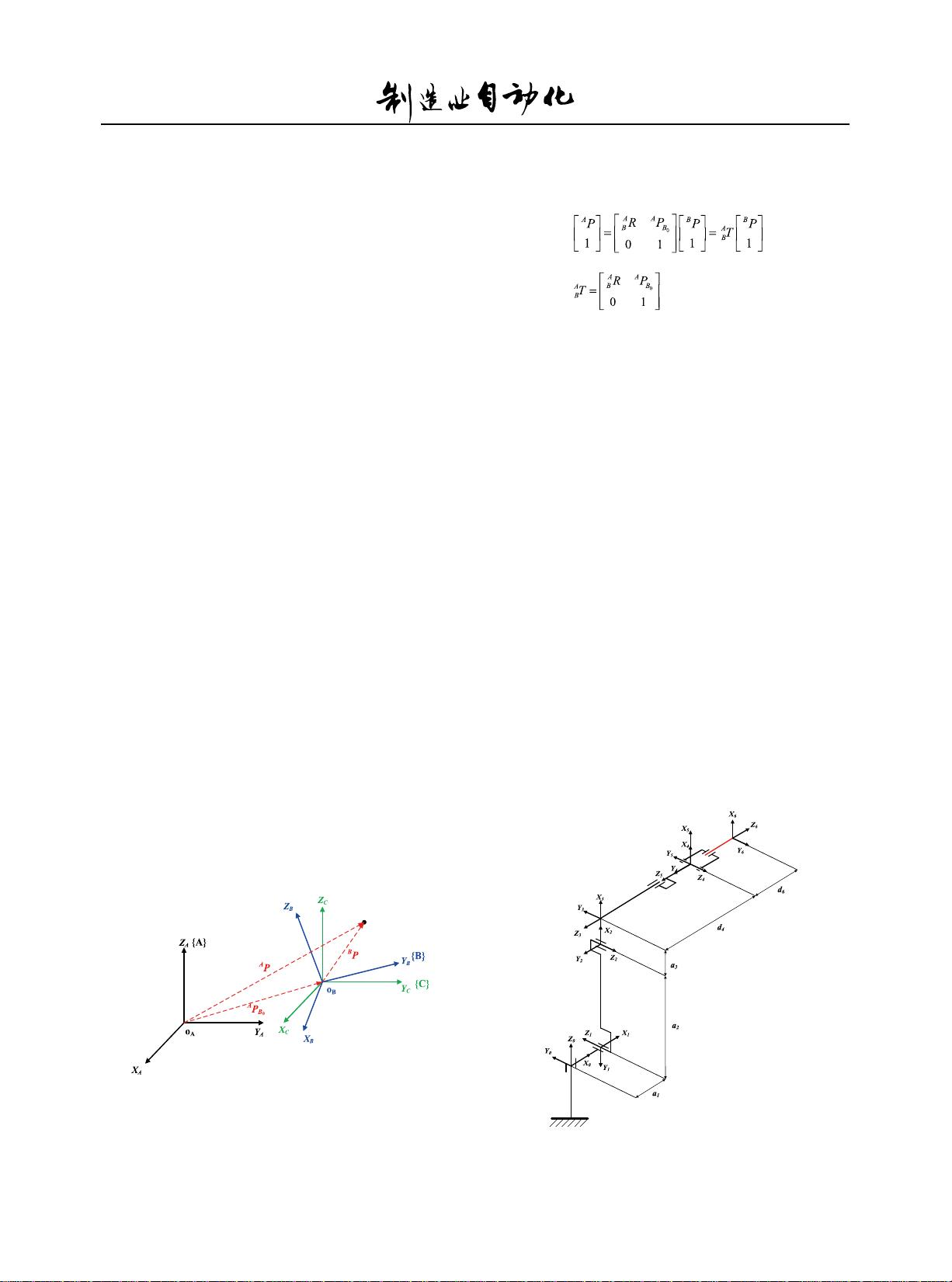
2)姿态描述
可通过在物体质心或者中心上固定一个坐标系,并
给出此坐标系相对于参考坐标系的数学表达来描述物体
的姿态
[6]
。定义直角坐标系{B},将刚体B的质心或者中
心定义为坐标系{B}的原点,则可以用一个(3×3)的
旋转矩阵
A
R
B
来表示刚体B相对于坐标系{A}的姿态: