
嘉兴学院 自动控制理论仿真实验指导书
实验一 典型环节的 MATLAB 仿真
一、实验目的
1.熟悉 MATLAB 桌面和命令窗口,初步了解 SIMULINK 功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应
曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、SIMULINK 的使用
MATLAB 中 SIMULINK 是一个用来对动态系统进行建模、仿真和分析的软件包。
利用 SIMULINK 功能模块可以快速的建立控制系统的模型,进行仿真和调试。
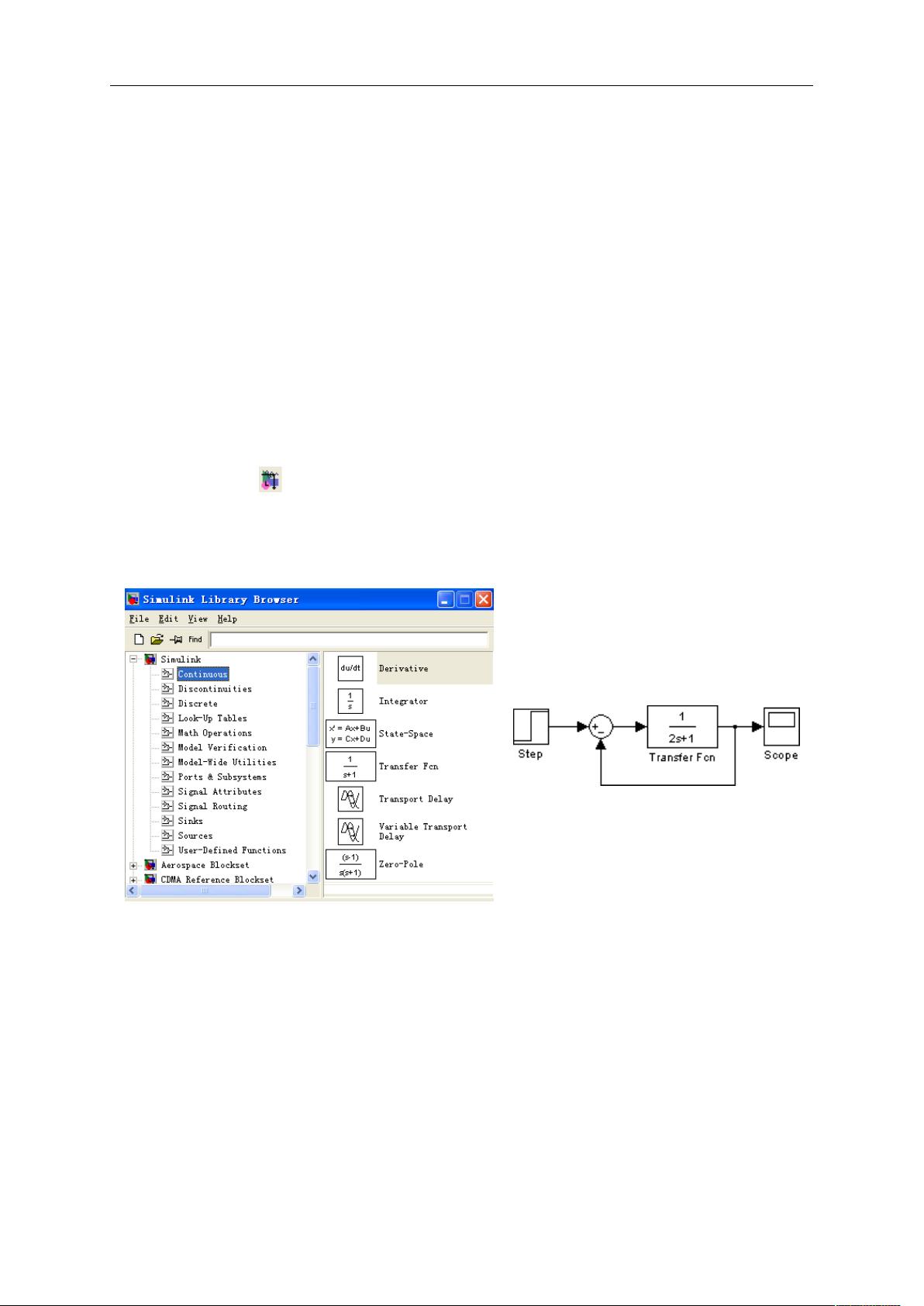
1.运行 MATLAB 软件,在命令窗口栏“>>”提示符下键入 simulink 命令,按 Enter
键或在工具栏单击 按钮,即可进入如图 1-1 所示的 SIMULINK 仿真环境下。
2.选择 File 菜单下 New 下的 Model 命令,新建一个 simulink 仿真环境常规模板。
3.在 simulink 仿真环境下,创建所需要的系统。
以图 1-2 所示的系统为例,说明基本设计步骤如下:
1)进入线性系统模块库,构建传递函数。点击 simulink 下的“Continuous”,再将
右边窗口中“Transfer Fen”的图标用左键拖至新建的“untitled”窗口。
2)改变模块参数。在 simulink 仿真环境“untitled”窗口中双击该图标,即可改变传
递函数。其中方括号内的数字分别为传递函数的分子、分母各次幂由高到低的系数,
数字之间用空格隔开;设置完成后,选择 OK,即完成该模块的设置。
1
图 1-1 SIMULINK 仿真界面
图 1-2 系统方框图

剩余30页未读,继续阅读
资源评论













