
机电系统控制技术
matlab 仿真——速度环仿真实验
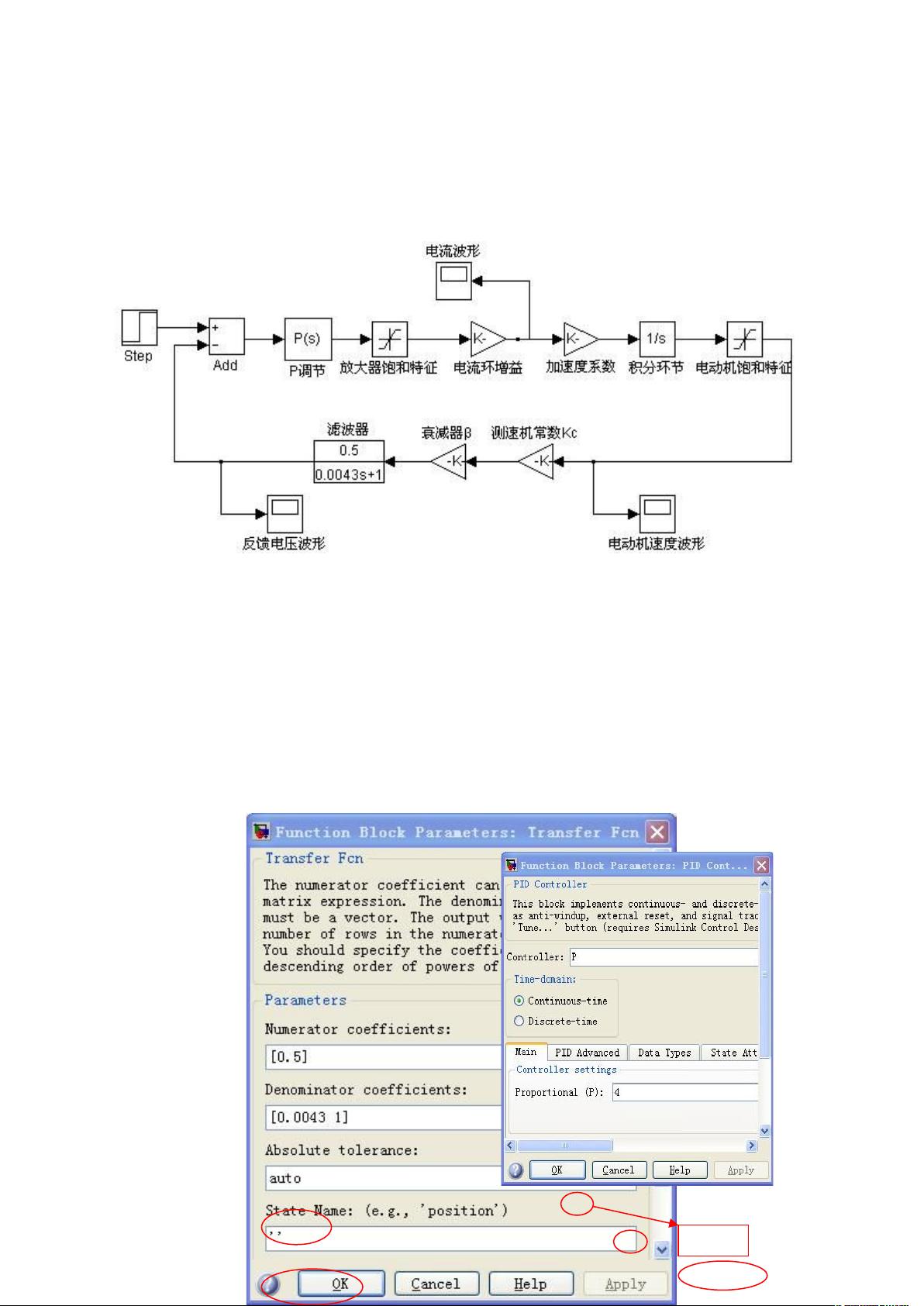
、具有比例调节器的速度环仿真实验
图 考虑饱和时的具有比例调节器的速度环仿真图
上述模块均可在 的子模块中找到:
——;
——、、;
—— 、!;
——;
——。
参数设置:
以 " 的阶跃输入,速度环采用 调节器,#$%,衰减器 &$'());电流环增
益 '(* , 加
速 度 系 数
+,' ; 将 运
算 放 大 器 后
的 饱 和 模 块
设 为 -" ,
将 测 速 发 电
机 后 的 饱 和
模 块 设 为
-.' / ;
测 速 机 常 数
#$'(.,0。
图 %滤
波器中传递
图 .输入阶跃参数 图 ,速度环比例调节器的增益
选择
值为 %
资源评论


猫一样的女子245
- 粉丝: 231
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


