Copyright 2024
1 Foreword
The interface was established in cooperation between the Verband der Automobilindustrie
e.V. (VDA) and Verband Deutscher Maschinen- und Anlagenbau e. V. (VDMA). The aim of
both parties is to create a universally applicable interface. Proposals for changes to the
interface shall be submitted to the VDA, are evaluated jointly with the VDMA and adopted into
a new version status in the event of a positive decision. The contribution to this document via
GitHub is greatly appreciated. The repository can be found at the following link:
https://github.com/vda5050/vda5050.
2 Objective of the document
The objective of the recommendation is to simplify the connection of new vehicles to an
existing master control system and to enable parallel operation with AGVs from different
manufacturers and conventional systems (inventory systems) in the same working
environment.
A uniform interface between a master control and AGVs shall be defined. This should be
achieved by the following points:
• Description of a standard for communication between AGV and master control and
thus a basis for the integration of transport systems into a continuous process
automation using co-operating transport vehicles.
• Increase in flexibility through, among other things, increased vehicle autonomy,
process modules and interface, and preferably the separation of a rigid sequence of
event-controlled command chains.
• Reduction of implementation time due to high "Plug & Play" capability, as required
information (e.g., order information) are provided by central services and are
generally valid. Vehicles should be able to be put into operation independently of the
manufacturer with the same implementation effort taking into account the
requirements of occupational safety.
• Complexity reduction and increase of the "Plug & Play" capability of the systems
through the use of uniform, overarching coordination with the corresponding logic for
all transport vehicles, vehicle models and manufacturers.
• Increase in manufacturers' independence using common interfaces between vehicle
control and coordination level.
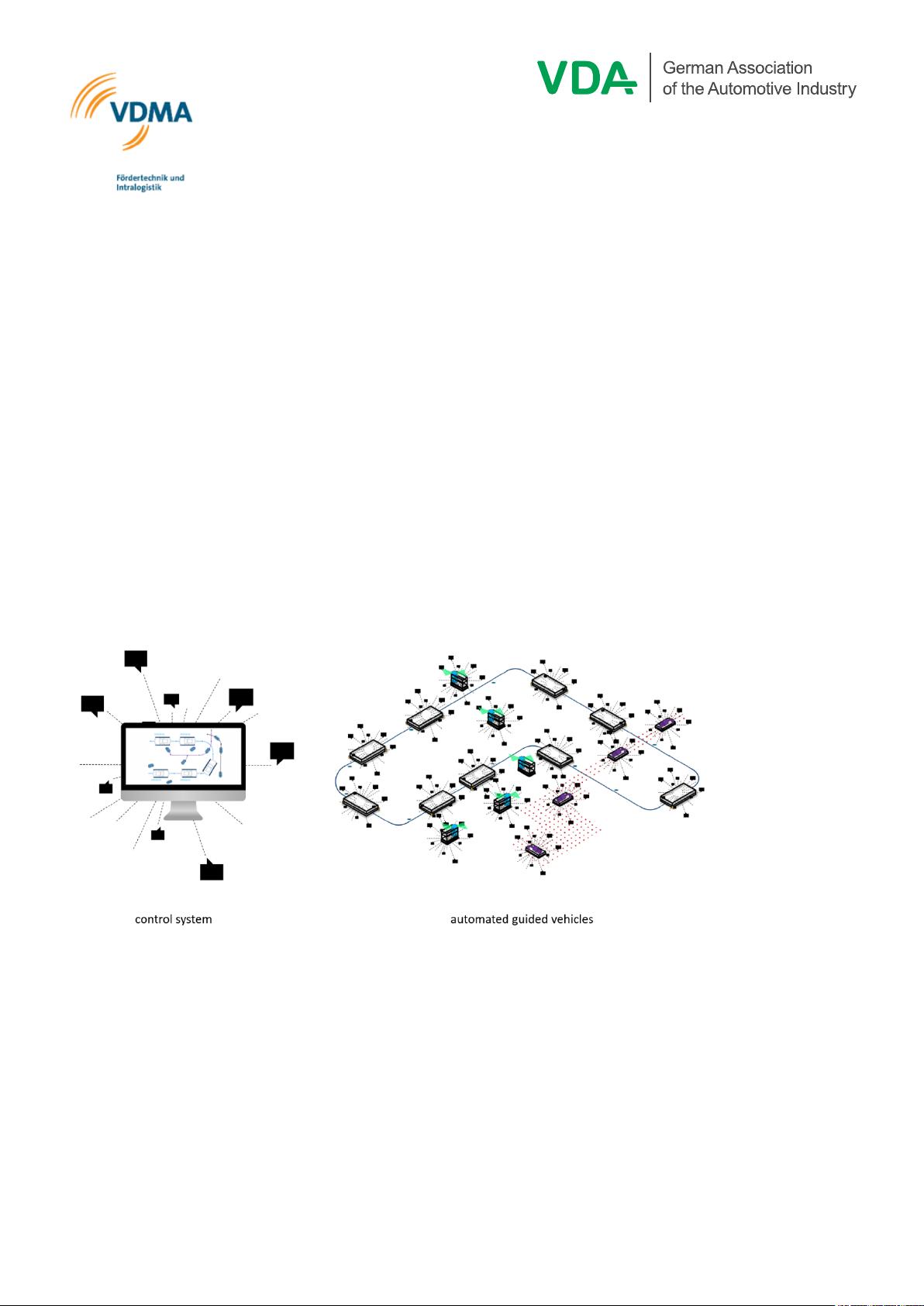
• Integration of proprietary DTS inventory systems by implementing vertical
communication between the proprietary master control and the superordinate master
control (cf. Figure 1).