

Motion Planning
Part II: Wild Frontiers
By Steven M. LaValle
H
ere, we give the Part II of the two-part tutorial.
Part I emphasized the basic problem formulation,
mathematical concepts, and the most common
solutions. The goal of Part II is to help you
understand current robotics challenges from a motion-
planning perspective.
Limitations of Path Planning
The basic problem of computing a collision-free path for a
robot among known obstacles is well understood and rea-
sonably well solved; however, deficiencies in the problem
formulation itself and the demand of engineering chal-
lenges in the design of autonomous systems raise impor-
tant questions and topics for future research.
The shortcomings of basic path planning are clearly
visible when considering how the computed path is typi-
cally used in a robotic system. It has been known for deca-
des that effective autonomous systems must iteratively
sense new data and act accordingly; recall the decades-old
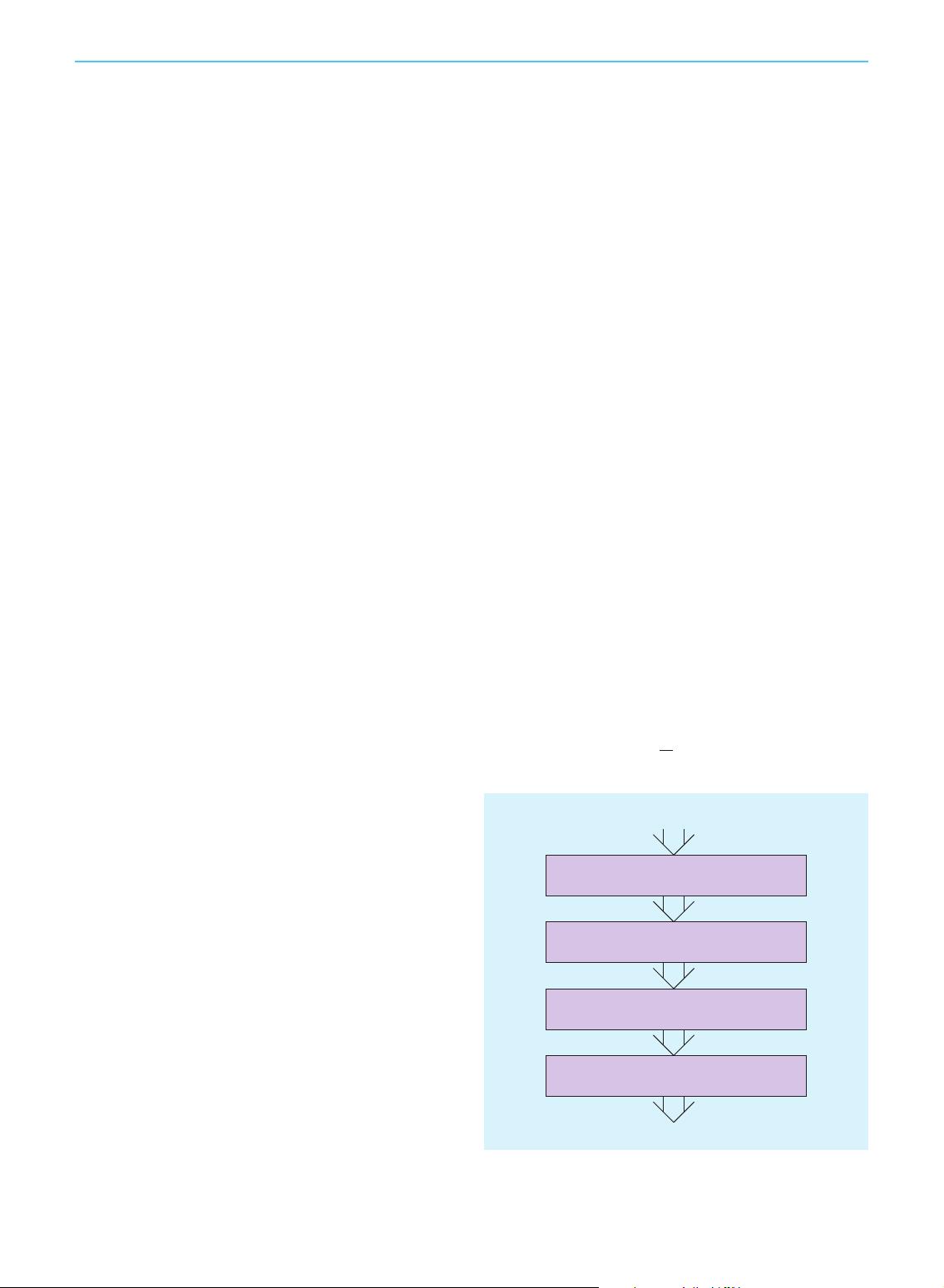
sense–plan–act (SPA) paradigm. Figure 1 shows how a
computed collision-free path s : ½0, 1!C
free
is usually
brought into alignment with this view by producing a
feedback control law. Step 1 produces s using a path-plan-
ning algorithm. Step 2 then smoothens s to produce
r : ½0, 1!C
free
, a path that the robot can actually follow.
For example, if the path is piecewise linear, then a carlike
mobile robot would not be able to turn sharp corners. Step
3 reparameterizes r to make a trajectory
~
q : ½0, t
f
!C
free
that nominally satisfies the robot dynamics (for example,
acceleration bounds). In Step 4, a state-feedback control
law that tracks
~
q as closely as possible during execution is
designed. This results in a policy or plan, p : X ! U. The
domain X is a state space (or phase space), and U is an
action space (or input space). These sets appear in the defi-
nition of the control system that models the robot:
_
x ¼ f (x, u) in which x 2 X and u 2 U.
One clear problem in this general framework is that a
later step might not succeed due to an unfortunate, fixed
choice in an earlier step. Even if it does succeed, the produced
solution may be horribly inefficient. This motivates planning
under differential constraints, which essentially performs
108 •
IEEE ROBOTICS & AUTOMATION MAGAZINE
•
JUNE 2011
Digital Object Identifier 10.1109/MRA.2011.941635
Date of publication: 14 June 2011
© DIGITAL VISION
剩余10页未读,继续阅读
资源评论


keci0813
- 粉丝: 0
- 资源: 3









最新资源
- 行政管理人员面试题.doc
- 行政秘书.doc
- 秘书笔试题.doc
- 01.经典行为面试题目(个人品行).doc
- 02.经典行为面试题目(认知能力).doc
- 05.素质模型与行为面试题库(销售).doc
- 06.外企面试常见问题114例(中英文对照).doc
- 12.中外知名企业的招聘典型试题精选.doc
- 13.经典行为面试题目(动力系统二).docx
- 20.行为面试法精讲精练.ppt
- 19.校园招聘及行为面试法.ppt
- 22.基于胜任力的行为面试法.pptx
- 01.20XXjava面试题全攻略.doc
- 03.IT MRPII人员考试试题.doc
- 06.JAVA-SSH面试题.doc
- 12.SQL面试题目汇总.doc
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


