.: :,
,:::::::: ::` ::: :::
,:::::::: ::` ::: :::
.,,:::,,, ::`.:, ... .. .:, .:. ..`... ..` .. .:, .. :: .::, .:,`
,:: ::::::: ::, ::::::: `:::::::.,:: ::: ::: .:::::: ::::: :::::: .::::::
,:: :::::::: ::, :::::::: ::::::::.,:: ::: ::: :::,:::, ::::: ::::::, ::::::::
,:: ::: ::: ::, ::: :::`::. :::.,:: ::,`::`::: ::: ::: `::,` ::: :::
,:: ::. ::: ::, ::` :::.:: ::.,:: :::::: ::::::::: ::` :::::: :::::::::
,:: ::. ::: ::, ::` :::.:: ::.,:: .::::: ::::::::: ::` :::::::::::::::
,:: ::. ::: ::, ::` ::: ::: `:::.,:: :::: :::` ,,, ::` .:: :::.::. ,,,
,:: ::. ::: ::, ::` ::: ::::::::.,:: :::: :::::::` ::` ::::::: :::::::.
,:: ::. ::: ::, ::` ::: :::::::`,:: ::. :::::` ::` :::::: :::::.
::, ,:: ``
::::::::
::::::
`,,`
https://www.thingiverse.com/thing:1718984
RobotArm by ftobler is licensed under the Creative Commons - Attribution - Non-Commercial license.
http://creativecommons.org/licenses/by-nc/3.0/
# Summary
This is a 3D Printable Robot Arm. It may need a bit more time to build one, than your normal weekend Project. But the build process is one thing, the application environment the other. And that is what it is all about. Learning, combining and developing custom applications.
<b>If you make a derivative, please only upload the parts you changed. Thanks.</b>
<h2>Hardware</h2>
The design goal for me was to build a Robot, which is stiff and strong, but still small and easy to handle. I used the common NEMA17 Step Motors, which provide enough power for fast movements and high precision.
Almost every moveable joint has at least one ball bearing to reduce friction, overall stability and accuracy. The robot is designed to have a low center of mass.
The robot is powered over a Computer Power Supply (12V).
The gripper is easy to replace and is held horizontally in every position, which simplifies programming and also reduces the cost and complexity of additional axies.
Most parts have a industrial look like cast Iron parts.
<h2>Software</h2>
<b>Software is now on Github here: https://github.com/ftobler/robotArm/</b>
The control system uses an Arduino Mega with a RAMPS 1.4 Board and A4988 Drivers. I provide a solid and working programming base for the Arduino, which handles the Interpolation of the stepper motors, makes all geometric calculations and smooth accelerations. It can handle some sort of GCODE communication over Serial.
The software can be directly used without modifying or additional hardware like sensors can be added.
To get you started, I have a simple Interface for your Windows Computer, which has a sequencer and manual control options built in.
<b>You should already have some decent programming skills to modify and use the Software.</b> I am recommending this, because in my opinion programming is a key part of using a robot. Without it you can only scratch the surface of what's really possible.
<h2>Assembly</h2>
There are multiple versions of the big Gears. You may want to print them multiple times, if needed to reduce the gear slack of the rotational axis to a minimum. Depending on how high your Stepper Motor is, choose an appropriate leg height. Use Superglue to fix the bearings, if necessary. I have not cut any threads in the plastic. With PLA (maybe also others) you can 'melt' your thread through friction in, but you might want to drill the holes out a bit.
The Wiring of the Robot is not different from a 3D Printer that uses a RAMPS board. Use the official documentation: http://www.reprap.org/wiki/RAMPS_1.4
You can find details about the dimensions in 'doc2.pdf'
<h2>Video</h2>
I made a 3D animation, which gives you a good technical overview and a I show a simple application in another video.
Animation: https://youtu.be/-LztK9TKcZk
Actual Robot: https://youtu.be/HLlylJr_Vs4
# Print Settings
Printer: RF1000
Rafts: No
Supports: No
Resolution: 0.2mm
Infill: about 15%
Notes:
Printed in clear PLA.
Please look for a tight fit for the gears, there are multiple versions available.
# How I Designed This
<h2>Turntable</h2>
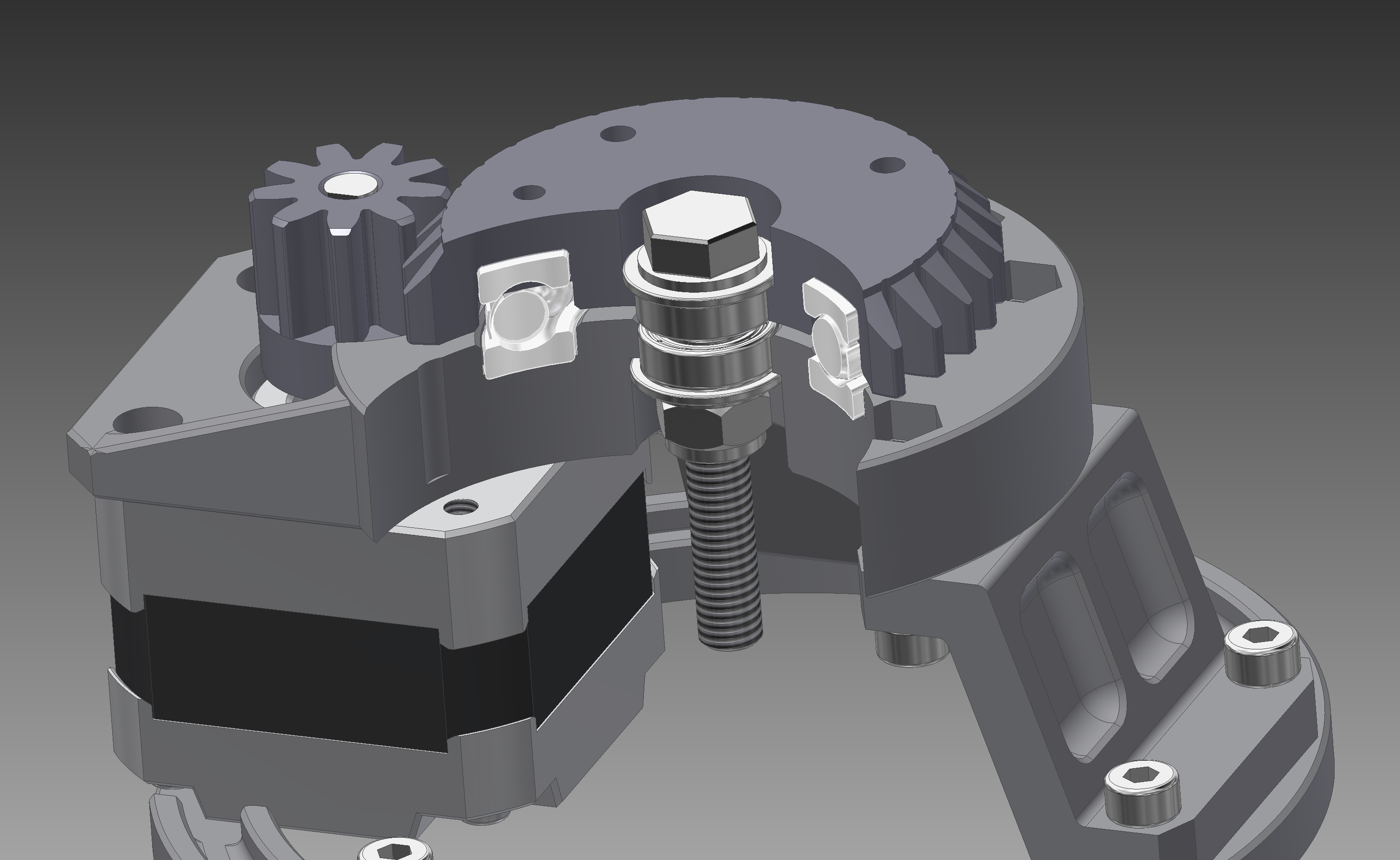
One of the most critical parts of my design is the turntable. It uses multiple steel bearings.
A large thrust bearing is used to reduce flex in the design. Because 3D Printed parts are softer than metal, You might need bigger contact areas. The fully extended robot arm on top of it multiplies every gear and bearing tolerance you have.

the turntable is one of the most critical parts

View of the large Thrust Bearing. Since it consists of loose parts There is a bolt and two more bearings. (Thrust Bearing 25x42x11mm (51105))
Base bearings detail view.
<h2>Drawings</h2>
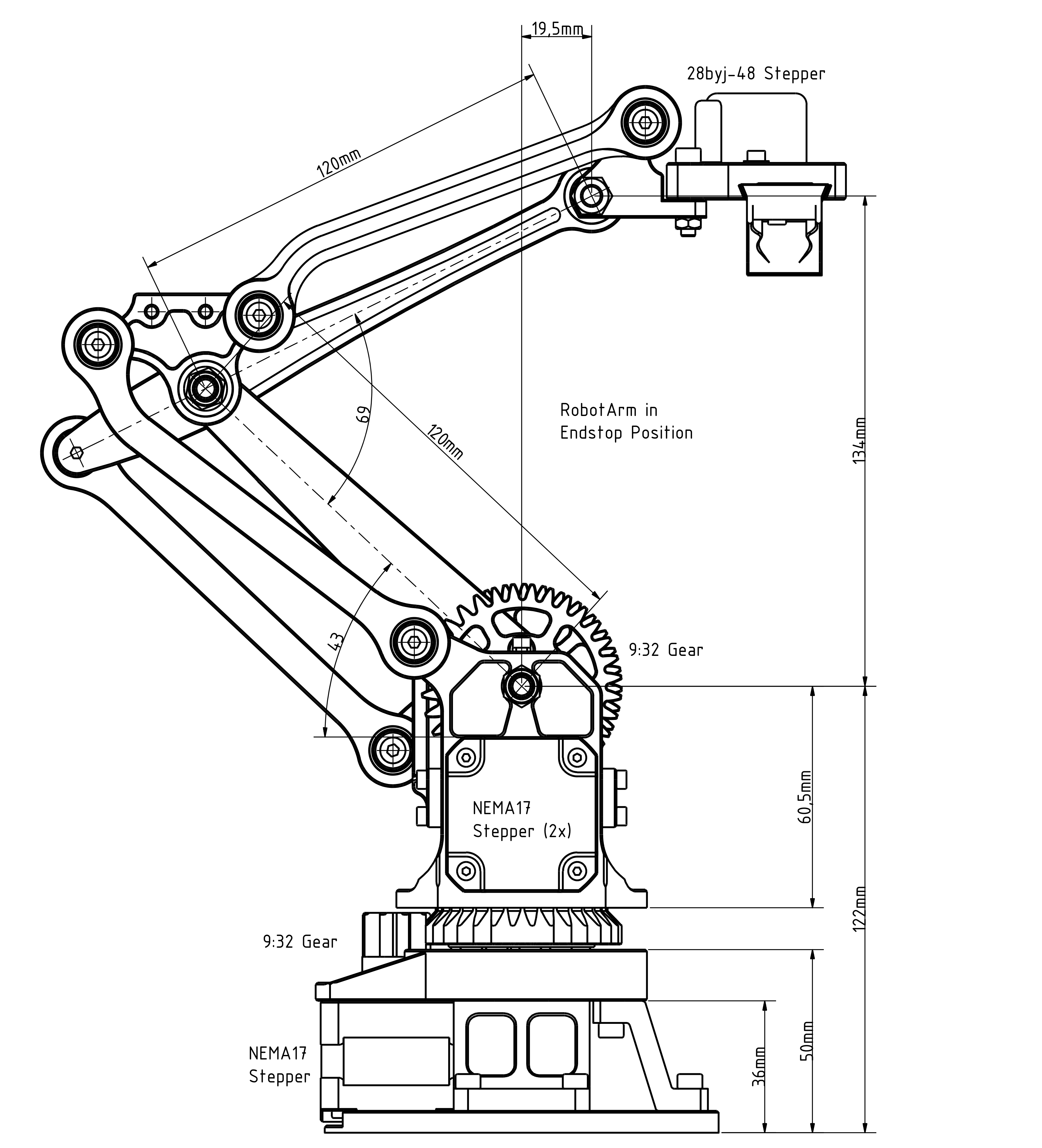
detail drawing of the Robot. RobotArm is shown in Endstop Position

Topology of an typical Robot Environment. The Robot normally is in the center of everything and every station/machine is aligned radially. This makes sense, because the robot rotates and can reach everything relatively easy.

some of the small ball bearings I used. (Bearing 4x13x5mm (624zz) and Flanged Bearing 13x6x5mm (F686zz))
<h2>GCODE</h2>
A valid gcode command looks like <code>G1 X0 Y120 Z120</code>
There have to be spaces in between.
<ul>
<li><code>G0</code>=<code>G1</code>: Move <code>XYZ</code> in mm (cartesian), <code>F</code> in mm/s. Always uses Absolute coordinates. Unlike 3D Printers, there is no E-Axis. On every move there is an acceleration and deacceleration.</li>
<li><code>G4</code>: Dwell / Sleep <code>T</code> in milliseconds</li>
<li><code>M3</code>: Close Gripper / Aux Motor <code>T</code> in Steps. Cannot move simultaneously to <code>G</code></li>
<li><code>M5</code>: Open Gripper / Aux Motor <code>T</code> in Steps. Cannot move simultaneously to <code>G</code></li>
<li><code>M17</code>: Enable Stepper Motors, also Enables Fan</li>
<li><code>M18</code>: Disables Stepper Motors, also Disables Fan with delay</li>
<li><code>M106</code>: Enables Fan</li>
<li><code>M106</code>: Disables Fan</li>
</ul>
<h2>Desktop Software</h2>
I wrote a simple desktop application to control the robot. Clearly, this could be extended to a very big software project. So it provides only simple operations.
RobotArm_Software_v2.zip contains some bugfixes which includes some connection problems.
The software is written in Delphi

Softwareinterface
<h2>Nuts and Bolts</h2>
This is a <i>rough</i> count without warranty. I counted only the ones on the robot. So I recommend buying more than listed. Please add as much washers as needed, maybe buy different sizes. Washers and screws who are in contact to a bearing are only allowed to touch the inside rotary part.
- 16x M3x6
- 21x M3x8 (3x used as set screws)
- 4x M3x10
- 2x M3 Washer (large for gripper)
- 4x M3 Nut
- 6x M4x10
- 11x M4x16
- 2x M4x25
- 14x M4 Washer (small enough for Bearing)
- 8x M4 Nut
- 12x M6 Washer
python机器人编程-四轴机械臂学习用3D打印开源模型

180 浏览量
2023-08-31
15:13:25
上传
评论
收藏 7.83MB ZIP 举报
 三轴机械臂STL可打印图纸.zip (42个子文件)
三轴机械臂STL可打印图纸.zip (42个子文件)  STL可打印图纸 files
STL可打印图纸 files  GearRotate_0.10mmTolerance.stl 1.01MB GearBig_0.10mmTolerance.stl 1.06MB stabilizer_endstop.stl 652KB pleuel_bend.stl 241KB GearRotate_-0.10mmTolerance.stl 981KB GearBig_0.20mmTolerance.stl 1.02MB triplate.stl 1.06MB leg_35mm.stl 322KB base.stl 1.18MB lever.stl 325KB control_top.stl 606KB GearRotate_-0.05mmTolerance.stl 934KB leg_50mm.stl 305KB GearRotate_-0.20mmTolerance.stl 981KB GearBig_0.05mmTolerance.stl 1.06MB GearRotate_0.05mmTolerance.stl 1.01MB lowerShank.stl 349KB GearRotate_0.20mmTolerance.stl 1MB manipulator.stl 287KB socket_clearanceWoSetScrew.stl 746KB leg_40mm.stl 319KB gripperFinger.stl 237KB leg_30mm.stl 335KB baseRing.stl 555KB GearBig_0.01mmTolerance.stl 1.06MB GearSmall.stl 533KB GearRotate_0.15mmTolerance.stl 1021KB stabilizer.stl 373KB base_w_hole.stl 1.56MB upperShank.stl 348KB leg_45mm.stl 313KB gripperBase.stl 217KB GearBig_0.15mmTolerance.stl 1.01MB pleuel.stl 207KB socket.stl 737KB control_bottom.stl 491KB GearRotate_-0.15mmTolerance.stl 981KB gripperHolePlate.stl 183KB GearRotate_0.01mmTolerance.stl 1.01MB
GearRotate_0.10mmTolerance.stl 1.01MB GearBig_0.10mmTolerance.stl 1.06MB stabilizer_endstop.stl 652KB pleuel_bend.stl 241KB GearRotate_-0.10mmTolerance.stl 981KB GearBig_0.20mmTolerance.stl 1.02MB triplate.stl 1.06MB leg_35mm.stl 322KB base.stl 1.18MB lever.stl 325KB control_top.stl 606KB GearRotate_-0.05mmTolerance.stl 934KB leg_50mm.stl 305KB GearRotate_-0.20mmTolerance.stl 981KB GearBig_0.05mmTolerance.stl 1.06MB GearRotate_0.05mmTolerance.stl 1.01MB lowerShank.stl 349KB GearRotate_0.20mmTolerance.stl 1MB manipulator.stl 287KB socket_clearanceWoSetScrew.stl 746KB leg_40mm.stl 319KB gripperFinger.stl 237KB leg_30mm.stl 335KB baseRing.stl 555KB GearBig_0.01mmTolerance.stl 1.06MB GearSmall.stl 533KB GearRotate_0.15mmTolerance.stl 1021KB stabilizer.stl 373KB base_w_hole.stl 1.56MB upperShank.stl 348KB leg_45mm.stl 313KB gripperBase.stl 217KB GearBig_0.15mmTolerance.stl 1.01MB pleuel.stl 207KB socket.stl 737KB control_bottom.stl 491KB GearRotate_-0.15mmTolerance.stl 981KB gripperHolePlate.stl 183KB GearRotate_0.01mmTolerance.stl 1.01MB LICENSE.txt 20KB
LICENSE.txt 20KB attribution_card.html 2KB README.txt 8KB
attribution_card.html 2KB README.txt 8KB资源评论














