
1)图像坐标系(Pixel coordinate system)
摄像机采集的数字图像在计算机内可以存储为数组,数组中的每一个元素 (象素,
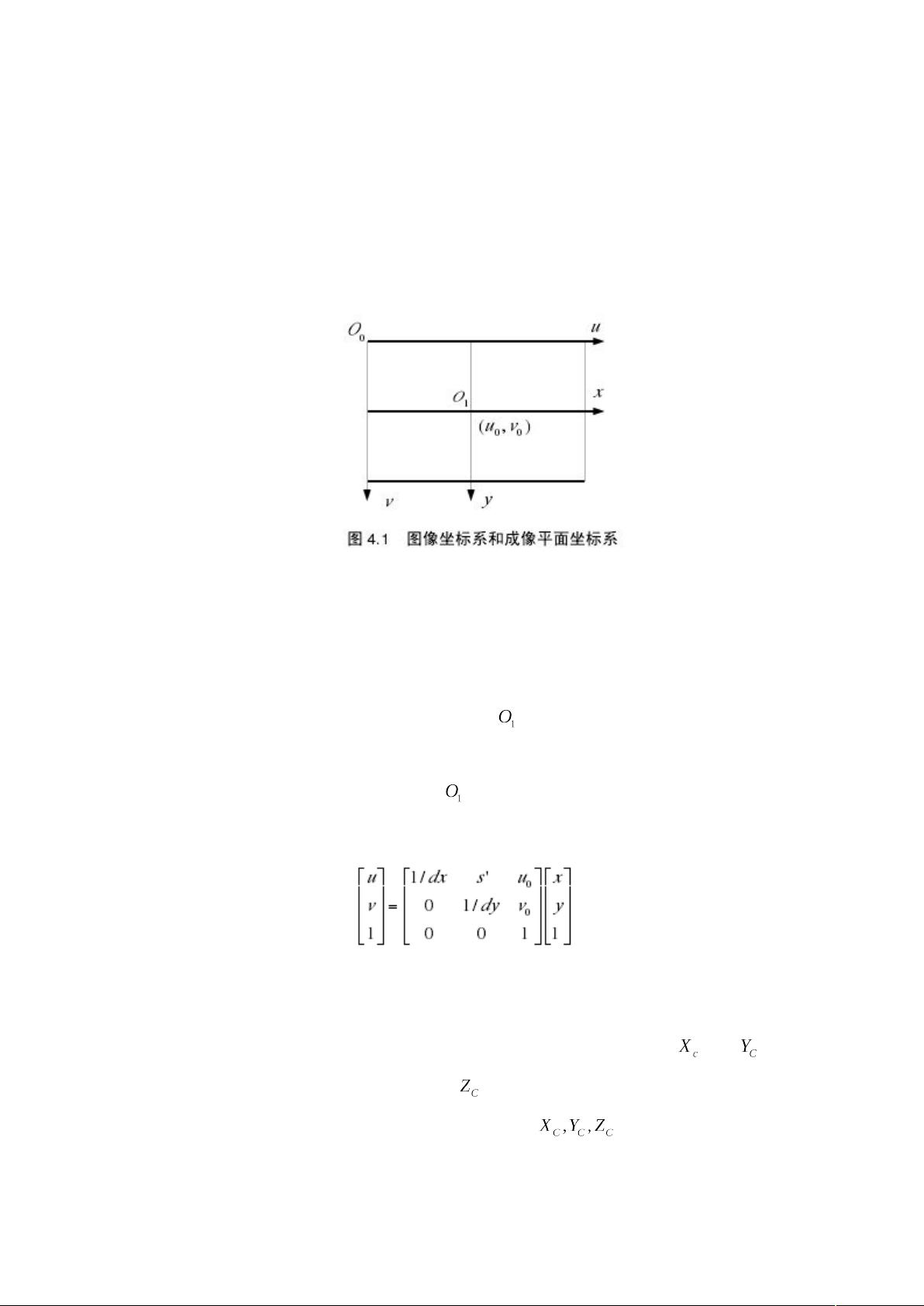
pixel)的值即是图像点的亮度(灰度)。如图 4.1 所示,在图像上定义直角坐标系
u-v,每一象素的坐标(u,v)分别是该象素在数组中的列数和行数。故(u,v)是以象
素为单位的图像坐标系坐标。
2)成像平面坐标系(Retinal coordinate system)
由于图像坐标系只表示象素位于数字图像的列数和行数,并没有用物理单位表
示出该象素在图像中的物理位置,因而需要再建立以物理单位 (例如厘米)表示
的成像平面坐标系 x-y,如图 4.1 所示。我们用(x,y)表示以物理单位度量的成像
平面坐标系的坐标。在 x-y 坐标系中,原点 定义在摄像机光轴和图像平面的
交点处,称为图像的主点(principal point),该点一般位于图像中心处,但由于摄
像机制作的原因,可能会有些偏离, 在坐标系下的坐标为(u0,v0),每个象素
在 x 轴和 y 轴方向上的物理尺寸为 dx、dy,两个坐标系的关系如下:
其中 s'表示因摄像机成像平面坐标轴相互不正交引出的倾斜因子(skew factor)。
3)摄像机坐标系(Camera coordinate system)
摄像机成像几何关系可由图 4.2 表示,其中 O 点称为摄像机光心, 轴和 轴
与成像平面坐标系的 x 轴和 y 轴平行, 轴为摄像机的光轴,和图像平面垂直。
光轴与图像平面的交点为图像主点 O',由点 O 与 轴组成的直角坐标系
称为摄像机坐标系。OO'为摄像机焦距。

huangyuanyang
- 粉丝: 1
- 资源: 3









最新资源
- VB+SQL宿舍管理系统(论文+源代码)(20248z).7z
- vb+sql医院门诊管理系统(系统+论文+开题报告+任务书+文献综述+参考文献)(202436).7z
- VB+SQL光盘信息管理系统(源代码+系统+答辩PPT)(20244m).7z
- VB+SQL上机考试系统设计(论文+源代码)(202402).7z
- VB+SQL会员制商场进销存(论文+源代码)(2024t3).7z
- vb+access高校固定资产管理系统(论文+程序)(2024b0).7z
- VB+access高校固定资产管理系统(论文+系统)(20244h).7z
- VB+ACCESS高校题库管理系统设计(源代码+论文)(2024jr).7z
- VB+ACCESS音像管理系统(源代码+系统)(20246k).7z
- vb+access酒店管理信息系统(论文+系统)(2024ej).7z
- VB+ACCESS采购管理系统开发(论文+系统+答辩PPT+封面)(2024wd).7z
- VB+Access酒店客房管理系统(源代码+论文+开题报告+任务书)(2024b0).7z
- VB+ACCESS酒店服务管理系统(论文+系统)(2024of).7z
- VB+Access酒店客房管理系统(论文+系统+开题报告+摘要+任务书)(2024c7).7z
- VB+ACCESS计算机等级考试管理系统(源代码+系统+答辩PPT)(2024bm).7z
- vb+ACCESS身份证管理系统设计(论文+源代码)(202422).7z
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



- 1
- 2
- 3
- 4
- 5
- 6
前往页