
附件1:
学 号:
2013133101
课 程 设 计
题 目
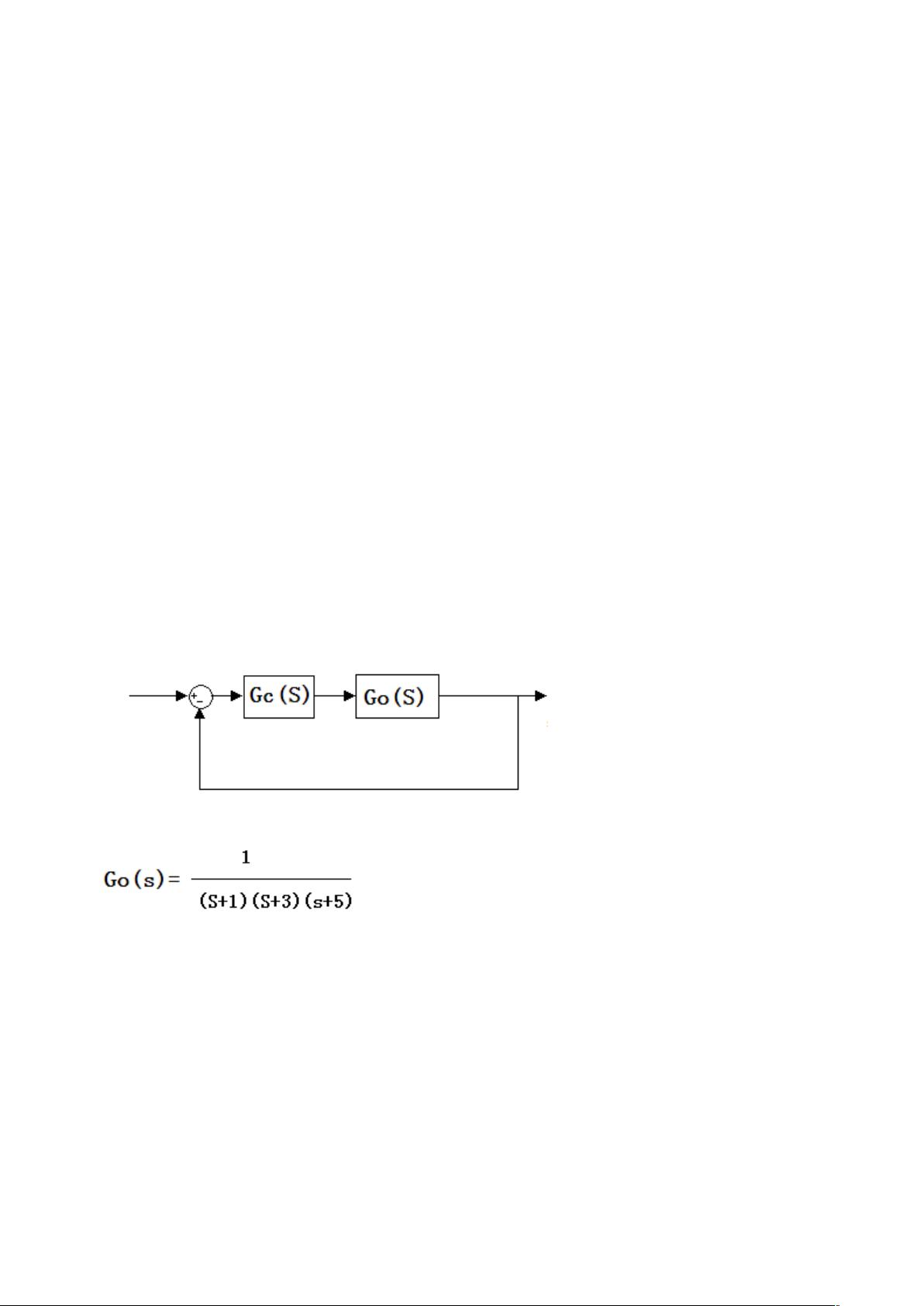
基于衰减曲线法的PID控制器参数整定
学 院
计信学院
专 业
自动化
班 级
2013级一班
学生姓名
殷实
指导教师
吴诗贤
2016
年
11
月
29
日
剩余9页未读,继续阅读
资源评论


hiuhuhulih
- 粉丝: 0
- 资源: 1









最新资源
- 常用的halcon算法,NVR录像机调用,海康、大华、opt相机,新增三菱PLC的读取和写入测试代码C++-视觉-2025
- 【IT教程网】D13_02_命令行_整合配置文件.wmv
- 【IT教程网】22.第6章数据(三)_数据比较.wmv
- 【IT教程网】D14_01_实例_管理DNS和LDAP.wmv
- 【IT教程网】14.第4章文档与报告_信息发布.wmv
- 【IT教程网】D13_01_命令行_基本标准输入的使用和Optparse.wmv
- 【IT教程网】21.第6章数据(二)_使用路径目录和文件.wmv
- 【IT教程网】D14_03_实例_FTP镜像.wmv
- 【IT教程网】D14_02_实例_Apache日志报告.wmv
- 【IT教程网】D11_05_创建GUI_使用Django_2.wmv
- 【IT教程网】7.第3章文本_Unicode字符串和re.wmv
- 【IT教程网】26.第6章数据(七)_使用tarfile模块.wmv
- 学习西门子S7-200 SMART PLC完全自学手册.zip
- js飞机大战,canvas绘图
- FPGA XDMA 中断模式 PCIE视频采集 HDMI 本设计使用Xilinx官方的XDMA方案搭建基于Xilinx系列FPGA的PCIE通信平台,使用XDMA的中断模式与QT上位机通讯,即QT上位
- 批量修改数据源连接池数工具
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


