
大学生“飞思卡尔”杯智能汽车竞赛
竞速比赛规则与赛场纪律
参赛选手须使用竞赛秘书处统一指定的竞赛车模套件,采用飞思卡尔半导体
公司的 8 位、16 位、32 位微控制器作为核心控制单元,自主构思控制方案进行
系统设计,包括传感器信号采集处理、电机驱动、转向舵机控制以及控制算法软
件开发等,完成智能车工程制作及调试,于指定日期与地点参加各分(省)赛区
的场地比赛,在获得决赛资格后,参加全国决赛区的场地比赛。参赛队伍的名次
(成绩)由赛车现场成功完成赛道比赛时间来决定,参加全国总决赛的队伍同时
必须提交车膜技术报告。大赛根据车模检测路径方案不同分为电磁、光电与摄像
头三个赛题组。车模通过感应由赛道中心电线产生的交变磁场进行路经检测的属
于电磁组;车模通过采集赛道图像(一维、二维)或者连续扫描赛道反射点的方
式进行进行路经检测的属于摄像头组;车模通过采集赛道上少数孤立点反射亮度
进行路经检测的属于光电组。
竞赛秘书处制定如下比赛规则适用于各分(省)赛区预赛以及全国总决赛,
在实际可操作性基础上力求公正与公平。
一、器材限制规定
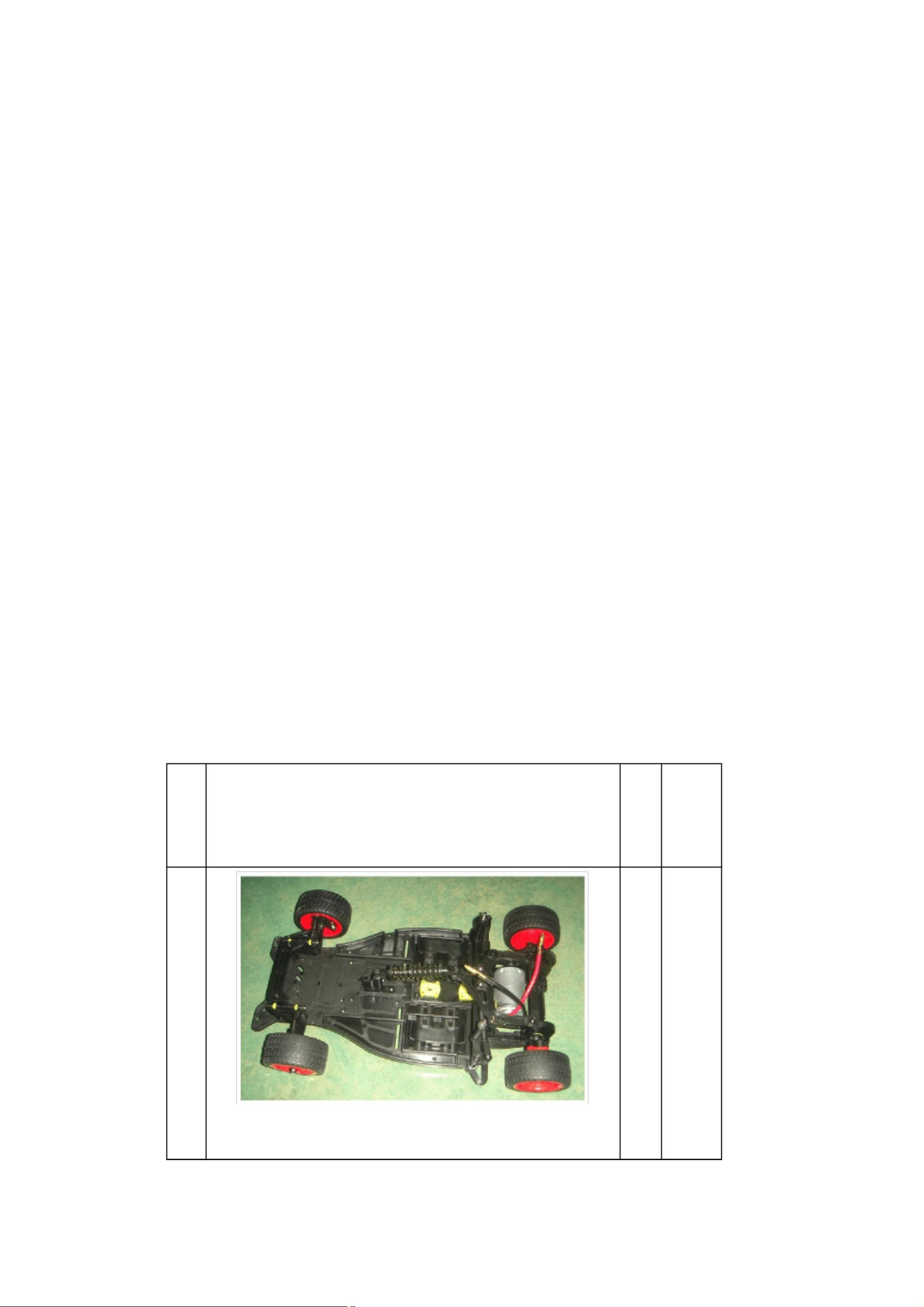
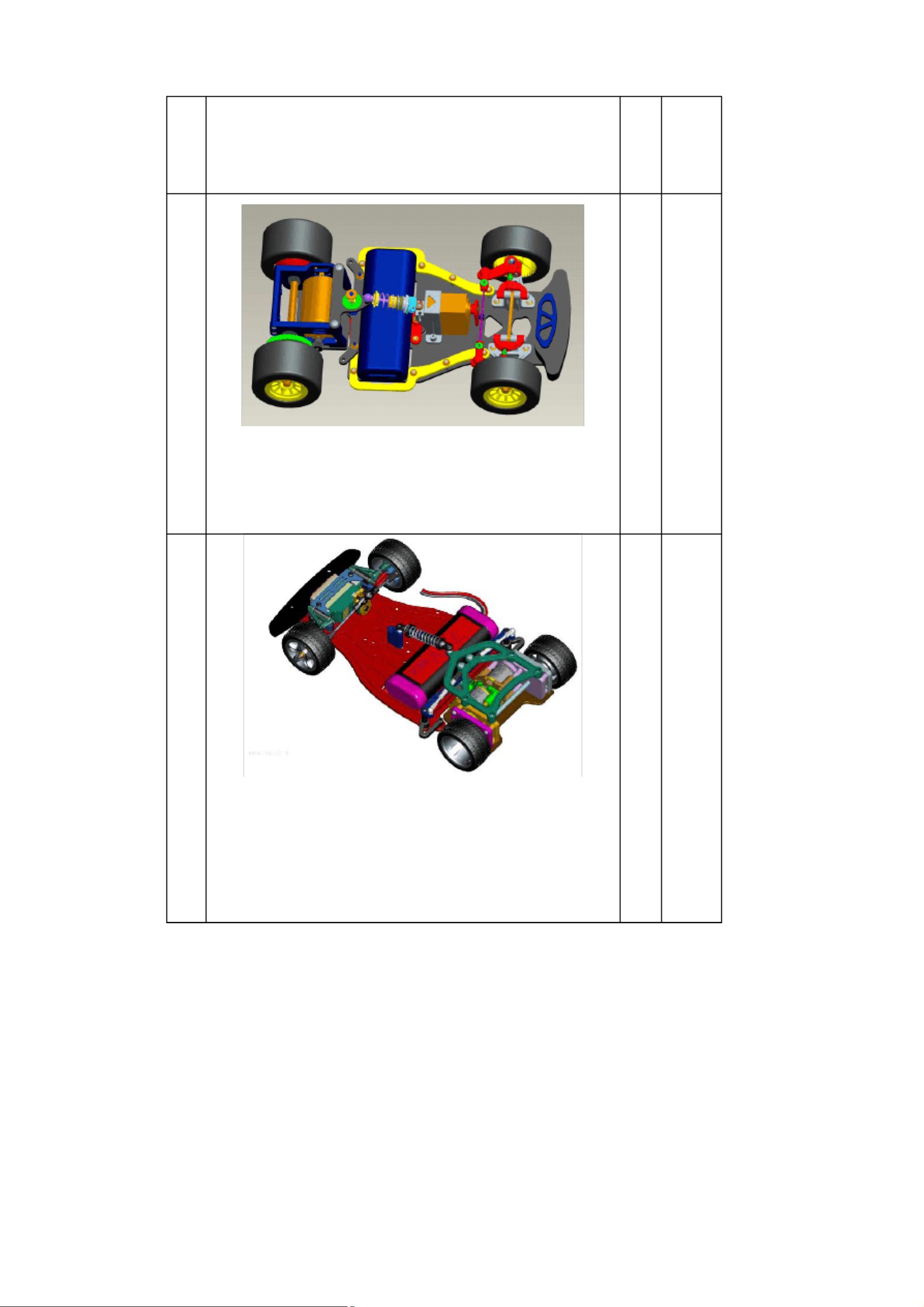
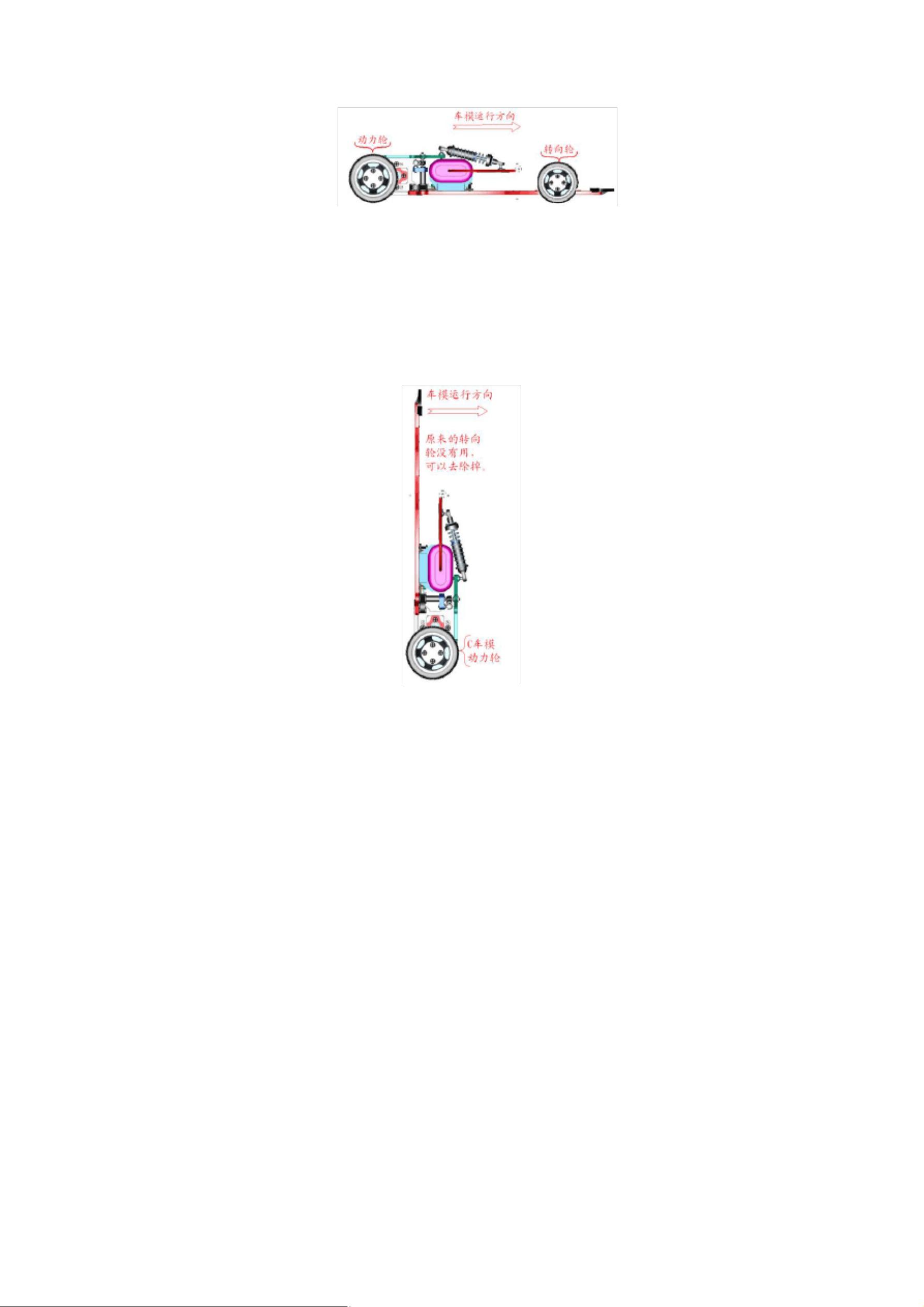
1. 须采用统一指定的车模。本届比赛指定采用三种车模,分别用于三个赛题组:
车模外观和规格
编 赛 供应
号 题
组
东莞
市博
A
型
车
模
车模:G768
厂商
摄
像
头
思电
子数
码科
组 技有
限公
司
剩余11页未读,继续阅读
资源评论


hhappy0123456789
- 粉丝: 72
- 资源: 5万+









最新资源
- 游戏光标变换器.zip
- 毕业设计python+yolov5算法+海康摄像头实时检测是否带安全帽以及危险区域源码+文档说明+训练好的模型
- notepad++ x64便携免安装版
- 此存储库将 YOLOv4 作为优化的 TensorRT 引擎部署到 Triton 推理服务器.zip
- 【完美运营版】PHP超级猫超级签名分发源码 安卓苹果APP分发平台源码
- 大福Daifaku奥鸿药业立库项目确认规格书.ppt
- QT调用百度地图的整个工程
- 基于python+yolov5算法+海康摄像头实时检测是否带安全帽以及危险区域项目源码+文档说明+训练好的模型(毕业设计)
- 基于Python的人体测量信息分析应用程序
- 模型压缩-YOLOv3 搭配多个轻量级主干(ShuffleNetV2 HuaWei GhostNet)、注意力、剪枝和量化.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


