
Herein, RS is a technological challenge where objects or scenes are analyzed by remote
means. This definition includes the traditional remote sensing (RS) areas, such as satellite-
based and aerial imaging. However, RS also includes nontraditional areas, such as unmanned
aerial vehicles (UAVs), crowdsourcing (phone imagery, tweets , etc.), and advanced driver-as-
sistance systems (ADAS). These types of RS offer different types of data and have different
processing needs, and thus also come with new challenges to algorithms that analyze the
data. The contributions of this paper are as follows:
1. Thorough list of ch allenges and open probl ems in DL RS. We focus on unsolved chal-
lenges and opportunities as they relate to (i) inadequate data sets, (ii) human-understand-
able solutions for modeling physical phenomena, (iii) big data, (iv) nontraditional
heterogeneous data sources, (v) DL architectures and learning algorithms for spectral,
spatial, and temporal data, (vi) transfer learning, (vii) an improved theoretic al under-
standing of DL systems, (viii) high barriers to entry, and (ix) training and optimizing
the DL. These observations are based on surveying RS DL and feature learning (FL)
literature, as well as numerous RS survey papers. This topic is the majority of our
paper and is discussed in Sec. 4.
2. Thorough literature survey. Herein, we review 205 RS application papers and 57 survey
papers in RS and DL. In addition, many relevant DL papers are cited. Our work extends
the previous DL survey papers
1–3
to be more comprehensive. We also cluster DL
approaches into different application areas and provide detailed discussions of many
relevant papers in these areas in Sec. 3.
3. Detailed discu ssions of modifying DL architectures to tackle RS problems. We highlight
approaches in DL for RS, including new architectures, tools, and DL compo nents that
current RS researchers have implemented in DL. This is discussed in Sec. 4.5.
4. Overview of DL. For RS researchers not familiar with DL, Sec. 2 provides a high-level
overview of DL and lists many good references for interested readers to pursue.
5. DL tool list. Tools are a major enabler of DL, and we revie w the more popular DL tools.
We also list pros and cons of several of the most popular toolsets and provide a table sum-
marizing the tools, with references and links (refer to Table 1). For more details, see
Sec. 2.3.5.
6. Online summaries of RS data sets and DL RS papers reviewed. First, an extensive online
table with details about each DL RS paper we reviewed: sensor modalities, a compilation
of the data sets used, a summary of the main contribution, and references. Second,
a data set summary for all the DL RS papers analyzed in this paper is provided online.
It contains the data set name, a description, a URL (if one is available), and a list of
references. Since the literature review for this paper was so extensive, these tables
are too large to put in the main paper but are provided online for the readers’ benefit.
These tables are located at http://cs-chan.com/source/FADL/Online_Paper_Summary_
Table.pdf, and http://cs-chan.com/source/FADL/Online_Dataset_Summary_Table.pdf.
This paper is organized as follows. Section 2 discusses related work in CV. This section
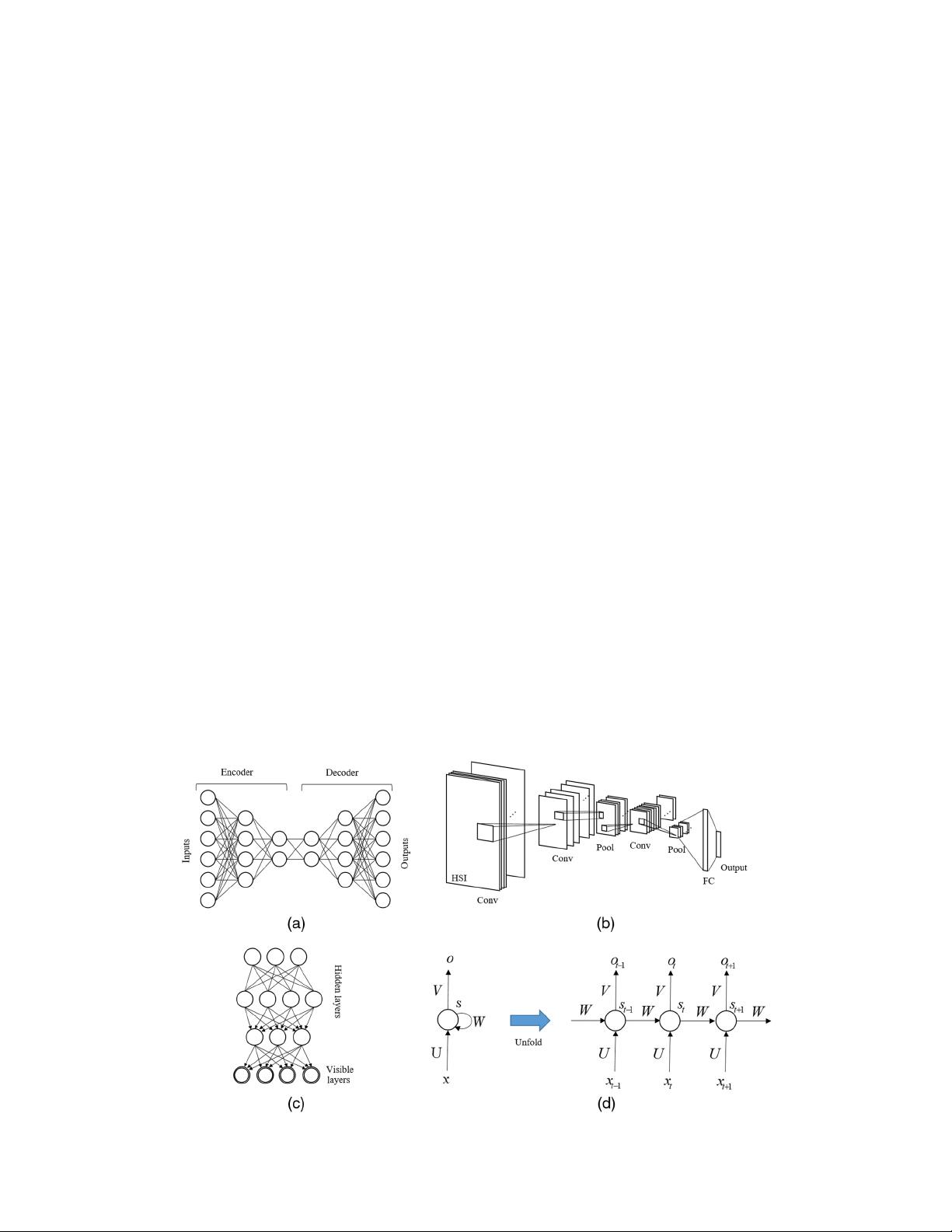
contrasts deep and “shallow” learning, and summarizes DL architectures. The main reasons
for success of DL are also discussed in this section. Section 3 provides an overview of DL
in RS, highlighting DL approaches in many disparate areas of RS. Section 4 discusses the unique
challenges and open issues in applying DL to RS. Conclusions and recommendations are listed
in Sec. 5.
2 Related Work in CV
CV is a field of study that aims to achieve visual understanding through computer analysis of
imagery. Traditional (aka, classical) approaches are sometimes referred to as “shallow” nowa-
days because there are typically only a few processing stages, e.g., image denoising or enhance-
ment followed by feature extraction then classification, that connect the raw data to our final
decisions. Examples of “shallow learn ers” include support vector machines (SVMs), Gaussian
mixtures models, hidden Markov models, and conditional random fields. In contrast, DL usually
Ball, Anderson, and Chan: Comprehensive survey of deep learning in remote sensing: theories. . .
Journal of Applied Remote Sensing 042609-2 Oct–Dec 2017
•
Vol. 11(4)




 读书旅行2021-08-04用户下载后在一定时间内未进行评价,系统默认好评。
读书旅行2021-08-04用户下载后在一定时间内未进行评价,系统默认好评。











