最全pid控制算法的C语言实现

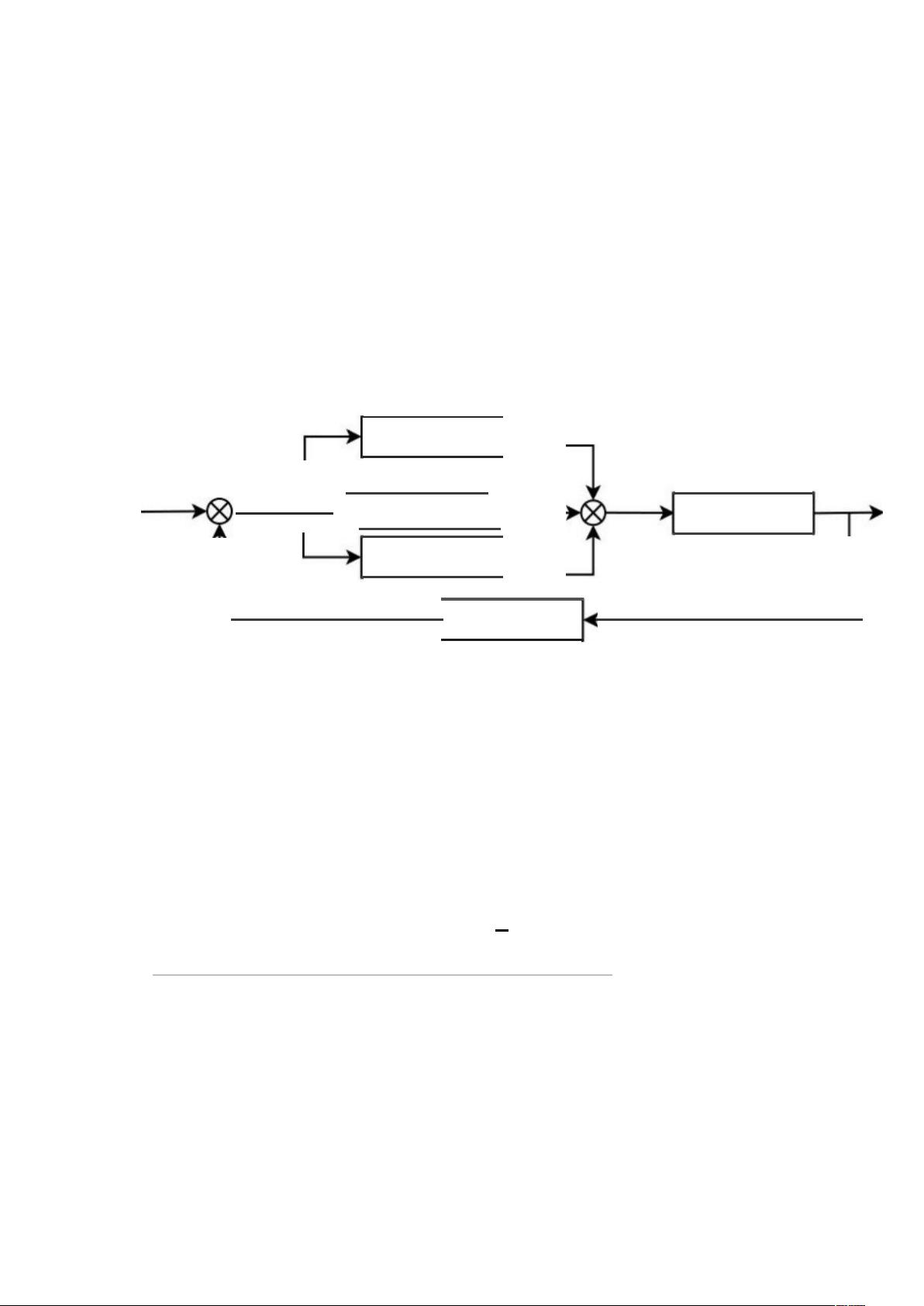
比例环节
执行器
微分环节
传感器
.
PID 控制算法的 C 语言实现 PID 算法原理
最近两天在考虑一般控制算法的
C
语言实现问题,发现网络上尚没有一套完
整的比较
体系的讲解 。于是总结了几天,整理一套思路分享给大家。
在工业应用中 PID 及其衍生算法是应用最广泛的算法之一,是当之无愧的万
能算
法,如果能够熟练掌握 PID 算法的设计与实现过程,对于一般的研发人员来
讲,应该
是足够应对一般研发问题了,而难能可贵的是,在我所接触 的控制算法
当中,PID 控
制算法又是最简单,最能体现反馈思想的控制算法,可谓经典中的
经典。经典的未必
是复杂的,经典的东西常常是简单的 ,而且是最简单的 ,想想
牛顿的力学三大定律
吧,想想爱因斯坦的质能方程吧,何等的简单 !简单的不是
原始的,简单的也不是落后
的 ,简单到了美的程度。先看看
PID
算法的一般形式:
+
积分环节
PID
的流程简单到了不能再简单的程度,通过误差信号控制被控量 ,而控制
器本身
就是比例、积分、微分三个环节的加和。这里我们规定 (在
t
时刻)
:
1.
输入量为
r in (t) ;
2.输出量为 rout (t) ;
3. 偏差量为
err (t) =r in (t) -rout (t) ;
pid 的控制规律为
r
T
n
d
e
厅
(
t
)
u
(
χ
)
二
k
p(
err
(
t
)
+
T
·
er
r
(
t
)
dt+
u
,.,4-
理解一下这个公式,主要从下面几个问题着手,为了便于理解,把控制环境
具体一
下:
1.
规定这个流程是用来为直流电机调速的 ;


剩余43页未读,继续阅读
资源评论

 ladygagada2019-09-23word文档,还有乱码
ladygagada2019-09-23word文档,还有乱码- 雷因哈鲁斯RaynHarrus2021-04-05真棒,6星好评












