


1
Sensorless Field Oriented Control of 3-Phase
Permanent Magnet Synchronous Motors
with CLA
Authors: Bilal Akin, Manish Bhardwaj
Texas Instruments, Inc.
C2000 Systems and Applications

2
Contents
Introduction ................................................................................................................................................ 3
PMSM Motors ............................................................................................................................................ 3
Field Oriented Control ............................................................................................................................... 5
Benefits of 32-bit C2000 Controllers for Digital Motor Control ............................................................... .11
TI Motor Control Literature and DMC Library .......................................................................................... 12
System Overview ..................................................................................................................................... 13
Hardware Configuration ........................................................................................................................... 17
Software Setup Instructions to Run HVPMSM_Sensorless_CLA Project ............................................... 20
Incremental System Build ........................................................................................................................ 21
Abstract
This application note presents a solution to control a permanent magnet synchronous motor (PMSM)
using the Control Law Accelerator (CLA) which is a small foot print co processor present which is
present on some of the microcontrollers from the C2000 family of MCU. TMS320F2803x devices are
part of the family of C2000 microcontrollers which enable cost-effective design of intelligent controllers
for three phase motors by reducing the system components and increase efficiency. With these devices
it is possible to realize far more precise digital vector control algorithms like the Field Orientated Control
(FOC). This algorithm’s implementation is discussed in this document. The FOC algorithm maintains
efficiency in a wide range of speeds and takes into consideration torque changes with transient phases
by processing a dynamic model of the motor. Among the solutions proposed are ways to eliminate the
phase current sensors and use an observer for speed sensorless control.
This application note covers the following:
A theoretical background on field oriented motor control principle.
Incremental build levels based on modular software blocks
Experimental results
3
Introduction
A brushless Permanent Magnet Synchronous motor (PMSM) has a wound stator, a permanent magnet
rotor assembly and internal or external devices to sense rotor position. The sensing devices provide
position feedback for adjusting frequency and amplitude of stator voltage reference properly to maintain
rotation of the magnet assembly. The combination of an inner permanent magnet rotor and outer
windings offers the advantages of low rotor inertia, efficient heat dissipation, and reduction of the motor
size. Moreover, the elimination of brushes reduces noise, EMI generation and suppresses the need of
brushes maintenance.
This document presents a solution to control a permanent magnet synchronous motor using the
TMS320F2803x. This new family of DSPs enables cost-effective design of intelligent controllers for
brushless motors which can fulfill enhanced operations, consisting of fewer system components, lower
system cost and increased performances. The control method presented relies on the field orientated
control (FOC). This algorithm maintains efficiency in a wide range of speeds and takes into
consideration torque changes with transient phases by controlling the flux directly from the rotor
coordinates. This application report presents the implementation of a control for sinusoidal PMSM
motor. The sinusoidal voltage waveform applied to this motor is created by using the Space Vector
modulation technique. Minimum amount of torque ripple appears when driving this sinusoidal BEMF
motor with sinusoidal currents.
Permanent Magnet Motors
There are primarily two types of three-phase permanent magnet synchronous motors (PMSM). One
uses rotor windings fed from the stator and the other uses permanent magnets. A motor fitted with rotor
windings, requires brushes to obtain its current supply and generate rotor flux. The contacts are made
of rings and have any commutator segments. The drawbacks of this type of structure are maintenance
needs and lower reliability. Replacing the common rotor field windings and pole structure with
permanent magnets puts the motor into the category of brushless motors. It is possible to build
brushless permanent magnet motors with any even number of magnet poles. The use of magnets
enables an efficient use of the radial space and replaces the rotor windings, therefore suppressing the
rotor copper losses. Advanced magnet materials permit a considerable reduction in motor dimensions
while maintaining a very high power density.
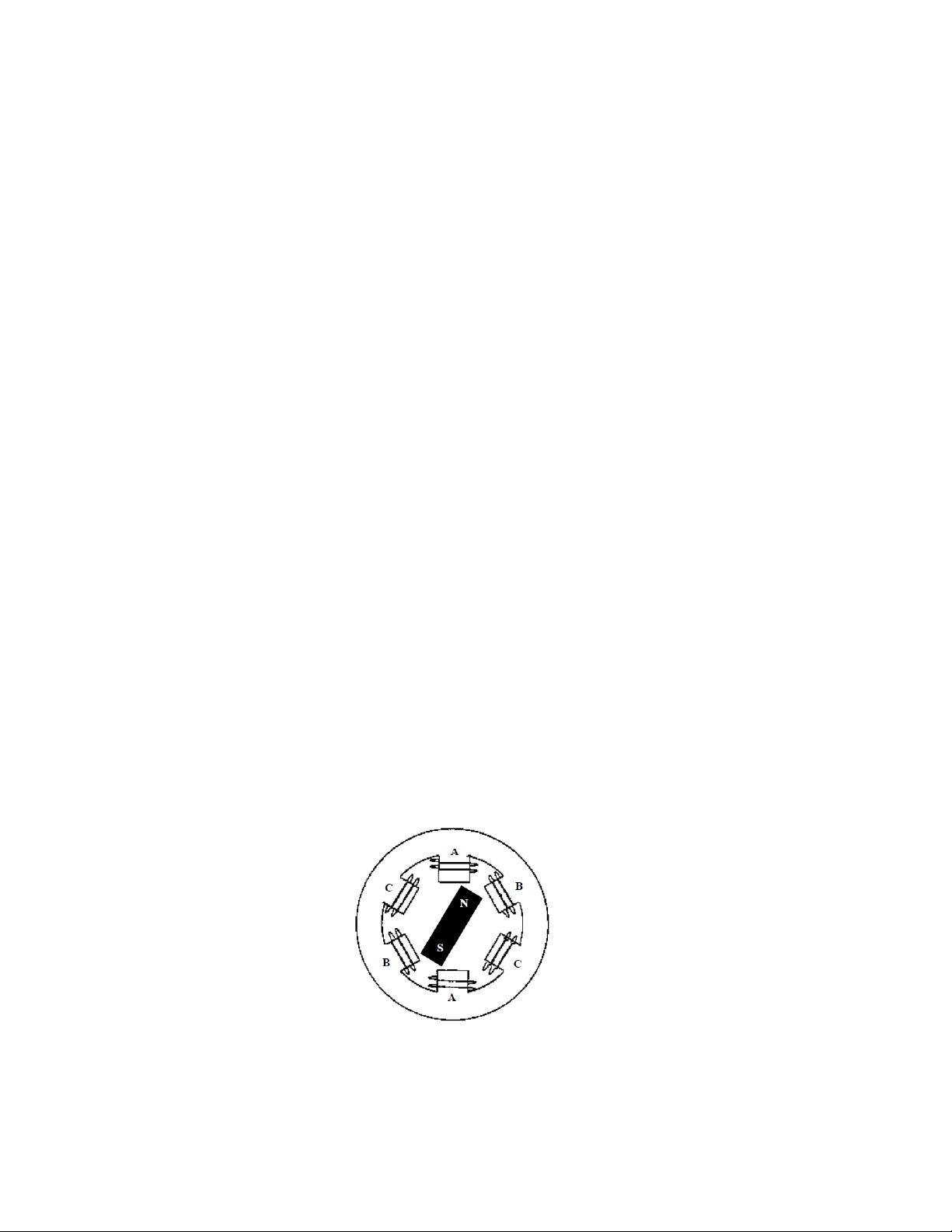
Fig. 1 A three-phase synchronous motor with a one permanent magnet pair
pole rotor

4
Synchronous Motor Operation
Synchronous motor construction: Permanent magnets are rigidly fixed to the rotating axis to create a
constant rotor flux. This rotor flux usually has a constant magnitude. The stator windings when
energized create a rotating electromagnetic field. To control the rotating magnetic field, it is
necessary to control the stator currents.
The actual structure of the rotor varies depending on the power range and rated speed of the
machine. Permanent magnets are suitable for synchronous machines ranging up-to a few Kilowatts.
For higher power ratings the rotor usually consists of windings in which a DC current circulates. The
mechanical structure of the rotor is designed for number of poles desired, and the desired flux
gradients desired.
The interaction between the stator and rotor fluxes produces a torque. Since the stator is firmly
mounted to the frame, and the rotor is free to rotate, the rotor will rotate, producing a useful
mechanical output.
The angle between the rotor magnetic field and stator field must be carefully controlled to produce
maximum torque and achieve high electromechanical conversion efficiency. For this purpose a fine
tuning is needed after closing the speed loop using sensorless algorithm in order to draw minimum
amount of current under the same speed and torque conditions.
The rotating stator field must rotate at the same frequency as the rotor permanent magnetic field;
otherwise the rotor will experience rapidly alternating positive and negative torque. This will result in
less than optimal torque production, and excessive mechanical vibration, noise, and mechanical
stresses on the machine parts. In addition, if the rotor inertia prevents the rotor from being able to
respond to these oscillations, the rotor will stop rotating at the synchronous frequency, and respond
to the average torque as seen by the stationary rotor: Zero. This means that the machine experiences
a phenomenon known as ‘pull-out’. This is also the reason why the synchronous machine is not self
starting.
The angle between the rotor field and the stator field must be equal to 90º to obtain the highest
mutual torque production. This synchronization requires knowing the rotor position in order to
generate the right stator field.
The stator magnetic field can be made to have any direction and magnitude by combining the
contribution of different stator phases to produce the resulting stator flux.
Fig. 2 The interaction between the rotating stator flux, and the rotor flux produces a torque
which will cause the motor to rotate.
5
Field Oriented Control
Introduction
In order to achieve better dynamic performance, a more complex control scheme needs to be applied,
to control the PM motor. With the mathematical processing power offered by the microcontrollers, we
can implement advanced control strategies, which use mathematical transformations in order to
decouple the torque generation and the magnetization functions in PM motors. Such de-coupled torque
and magnetization control is commonly called rotor flux oriented control, or simply Field Oriented
Control (FOC).
The main philosophy behind the FOC
In order to understand the spirit of the Field Oriented Control technique, let us start with an overview of
the separately excited direct current (DC) Motor. In this type of motor, the excitation for the stator and
rotor is independently controlled. Electrical study of the DC motor shows that the produced torque
and the flux can be independently tuned. The strength of the field excitation (i.e. the magnitude of
the field excitation current) sets the value of the flux. The current through the rotor windings determines
how much torque is produced. The commutator on the rotor plays an interesting part in the torque
production. The commutator is in contact with the brushes, and the mechanical construction is designed
to switch into the circuit the windings that are mechanically aligned to produce the maximum torque.
This arrangement then means that the torque production of the machine is fairly near optimal all the
time. The key point here is that the windings are managed to keep the flux produced by the rotor
windings orthogonal to the stator field.
AC machines do not have the same key features as the DC motor. In both cases we have only one
source that can be controlled which is the stator currents. On the synchronous machine, the rotor
excitation is given by the permanent magnets mounted onto the shaft. On the synchronous motor, the
only source of power and magnetic field is the stator phase voltage. Obviously, as opposed to the DC
motor, flux and torque depend on each other.
The goal of the FOC (also called vector control) on synchronous and asynchronous machine is to be
able to separately control the torque producing and magnetizing flux components. The control
technique goal is to (in a sense), imitate the DC motor’s operation. FOC control will allow us to
decouple the torque and the magnetizing flux components of stator current. With decoupled control of
the magnetization, the torque producing component of the stator flux can now be thought of as
independent torque control. To decouple the torque and flux, it is necessary to engage several
mathematical transforms, and this is where the microcontrollers add the most value. The processing
capability provided by the microcontrollers enables these mathematical transformations to be carried
out very quickly. This in turn implies that the entire algorithm controlling the motor can be executed at a
fast rate, enabling higher dynamic performance. In addition to the decoupling, a dynamic model of the
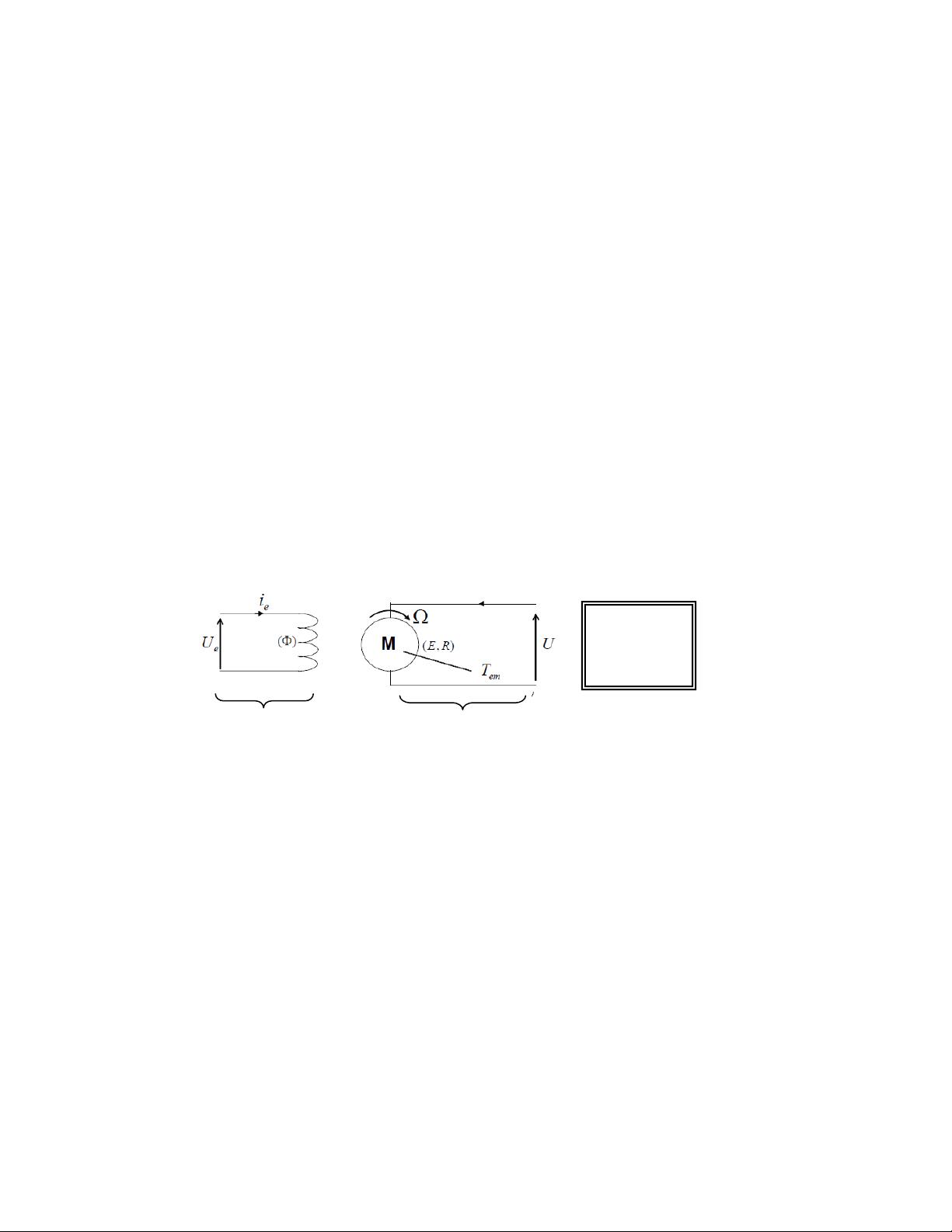
Fig 3. Separated excitation DC motor model, flux and torque are independently controlled
and the current through the rotor windings determines how much torque is produced.
)(
..
..
e
em
If
KE
IKT
=Φ
ΩΦ=
Φ=
Inductor (field
excitation)
Armature Circuit














