
应用报告
ZHCA557–July 2013
使使用用控控制制律律加加速速器器
(CLA)
的的
3
相相永永磁磁同同步步电电机机的的无无传传感感器器磁磁场场
定定向向控控制制
Bilal Akin and Manish Bhardwaj
摘摘要要
这份应用报告提出了一个使用控制律加速器 (CLA) 来控制永磁同步电机 (PMSM) 的解决方案,此加速器是
一个出现在某些 C2000™ MCU 系列微控制器上的小外形封装协处理器。 TMS320F2803x 器件是 C2000 系
列微控制器的部件,此微控制器能够通过减少系统组件实现用于三相电机的智能控制器的成本有效设计,并
且提高了效率。 借助于这些器件,有可能实现诸如磁场定向控制 (FOC) 等更加精准的数字矢量控制算法。
本文档中讨论了这个算法的实现。 FOC 算法在很大速度范围内保持高效,并且通过处理一个电机的动态模
型来将具有瞬态相位的转矩变化考虑在内 解决方案提出的方法免除了对相位电流传感器的需要,并且使用一
个观察器来实现速度无传感器控制。
这份应用报告涵盖了以下内容:
• 磁场定向电机控制原理的理论背景
• 基于模块化软件块的递增构建级
• 试验结果
内内容容
1 简介 ........................................................................................................................... 2
2 永磁电机 ...................................................................................................................... 3
3 同步电机运行 ................................................................................................................ 3
4 磁场定向控制 (FOC) ........................................................................................................ 4
5 FOC 的基本系统配置 ....................................................................................................... 8
6 32 位 C2000™ 控制器在数字电机控制 (DMC) 方面的优势 .......................................................... 10
7 TI 文献和数字电机控制 (DMC) 库 ....................................................................................... 11
8 CLA 上的数字电机控制 ................................................................................................... 11
9 系统概览 .................................................................................................................... 13
10 硬件配置(HVDCMC R1.1 套件) ...................................................................................... 15
11 递增系统构建 ............................................................................................................... 18
12 参考书目 .................................................................................................................... 35
图图片片列列表表
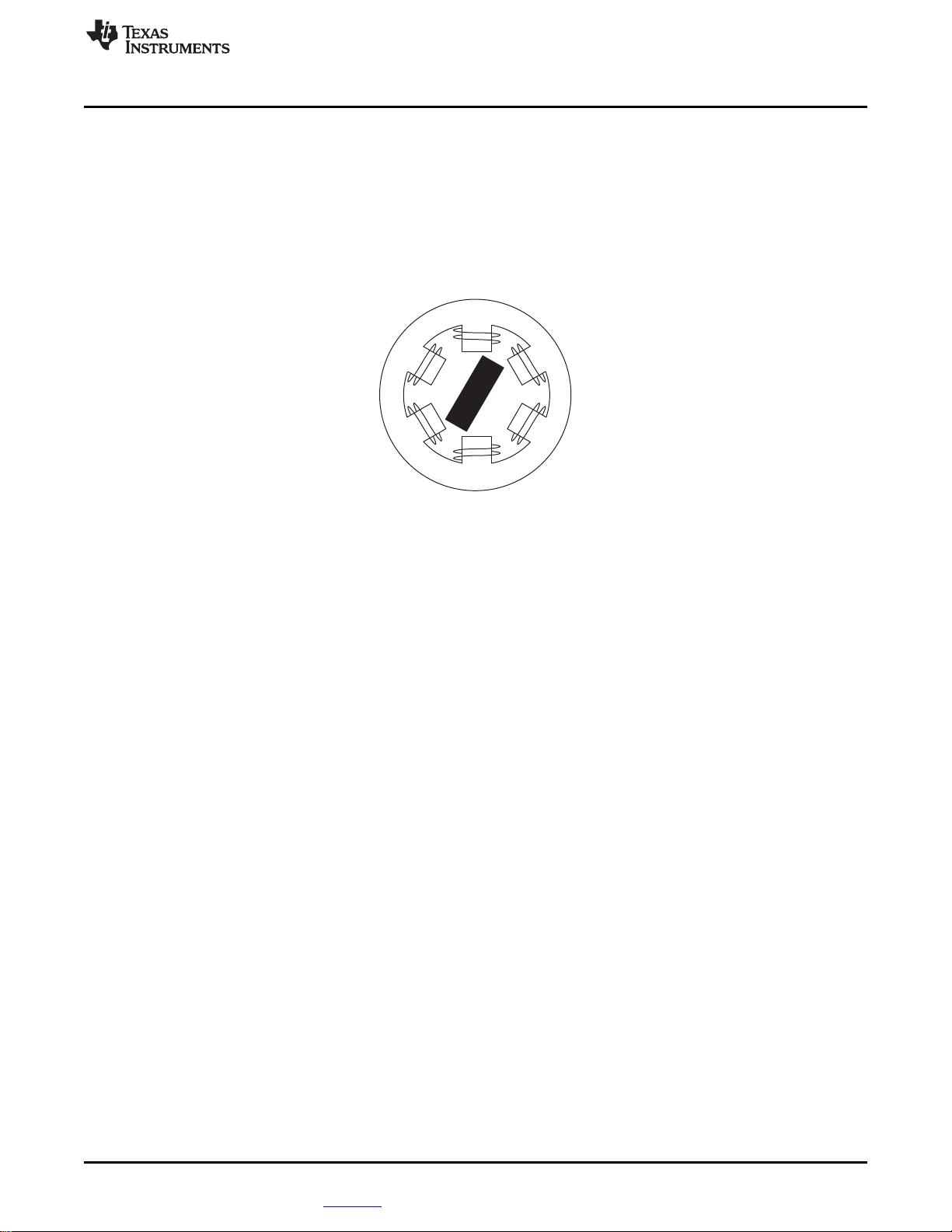
1 一个具有永磁对极转子的三相同步电机................................................................................... 3
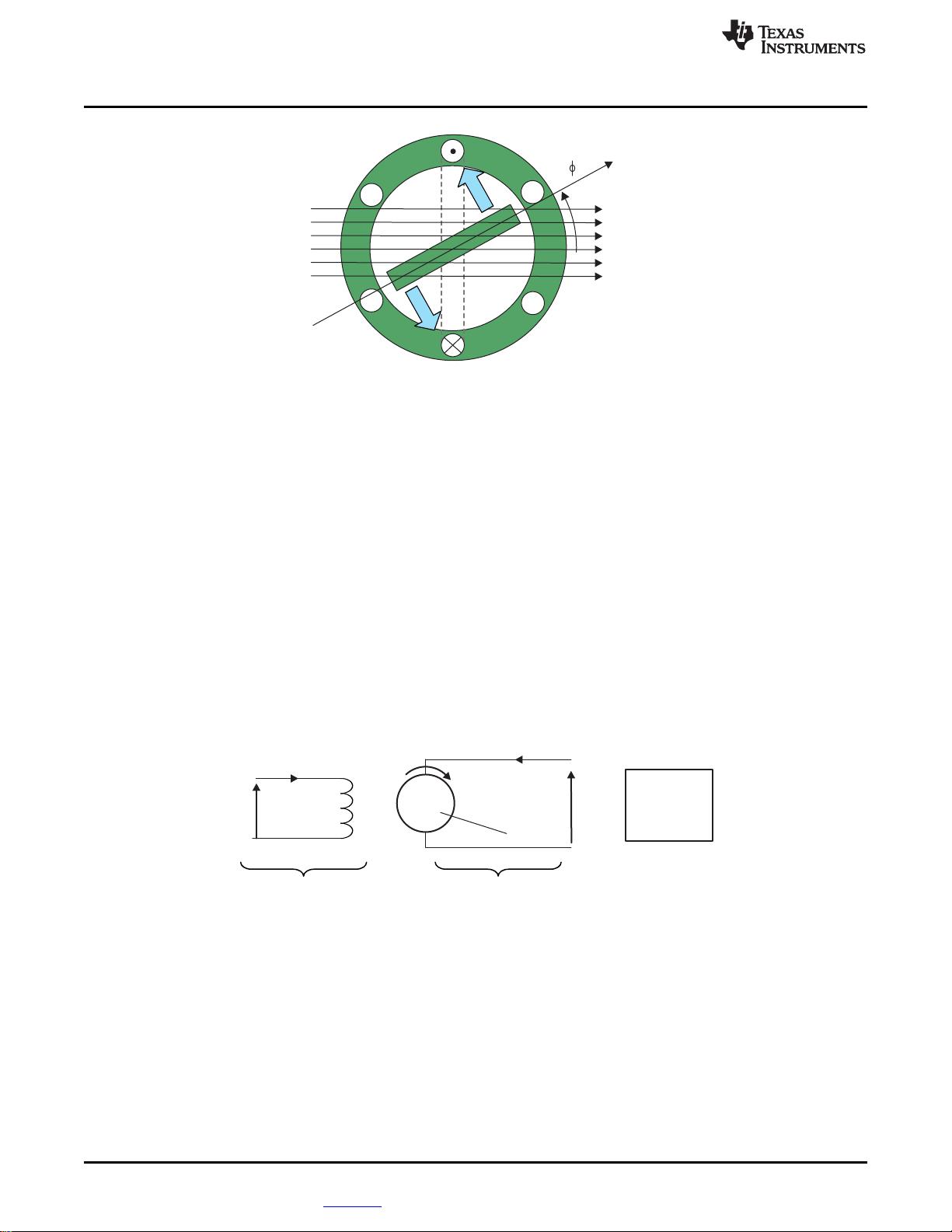
2 转动中的定子磁通和转子磁通间的交感产生了一个导致电机转动的转矩............................................. 4
3 分激直流电机模型(单独控制磁通和转矩,流经转子绕组的电流确定产生的转矩量)............................. 4
4 定子电流空间矢量和其以 (a,b,c) 形式表示的分量................................................................... 6
5 静止基准框架内的定子电流空间矢量和其分量 .......................................................................... 6
6 (α
,
β) 和 d,q 旋转基准框架内的定子电流空间矢量和其分量 ........................................................ 7
7 针对交流电机的 FOC 基本系统配置 ...................................................................................... 8
8 d,q 旋转基准框架内的电流、电压和转子磁通空间矢量以及它们与 a,b,c 和 (α
,
β) 静止基准框架的关
系.............................................................................................................................. 9
C2000, Code Composer Studio are trademarks of Texas Instruments.
All other trademarks are the property of their respective owners.
1
ZHCA557–July 2013
使用控制律加速器
(CLA)
的
3
相永磁同步电机的无传感器磁场定向控制
SPRABQ5 — http://www-s.ti.com/sc/techlit/SPRABQ5
版权 © 2013, Texas Instruments Incorporated

剩余35页未读,继续阅读
资源评论


南小鹏
- 粉丝: 38
- 资源: 289









最新资源
- 国际象棋检测2-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- ssd5课件图片记录保存
- 常用算法介绍与学习资源汇总
- Python与Pygame实现带特效的圣诞节场景模拟程序
- 国际象棋检测11-YOLO(v7至v9)、COCO、Darknet、Paligemma、VOC数据集合集.rar
- 使用Python和matplotlib库绘制爱心图形的技术教程
- Java外卖项目(瑞吉外卖项目的扩展)
- 必应图片壁纸Python爬虫代码bing-img.zip
- 基于Pygame库实现新年烟花效果的Python代码
- 浪漫节日代码 - 爱心代码、圣诞树代码
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


