

- -
第一章位置随动系统的概述
1.1 位置随动系统的概念
位置随动系统也称伺服系统,是输出量对于给定输入量的跟踪系统,它实
现的是执行机构对于位置指令的准确跟踪。位置随动系统的被控量 (输出量)是
负载机械空间位置的线位移和角位移,当位置给定量(输入量)作任意变化时,
该系统的主要任务是使输出量快速而准确地复现给定量的变化,所以位置随动
系统必定是一个反应控制系统。
位置随动系统是应用非常广泛的一类工程控制系统。它属于自动控制系统中
的一类反应闭环控制系统。随着科学技术的开展,在实际中位置随动系统的应
用领域非常广泛。例如,数控机床的定位控制和加工轨迹控制,船舵的自动操
纵,火炮方位的自动跟踪,宇航设备的自动驾驶,机器人的动作控制等等。随
着机电一体化技术的开展,位置随动系统已成为现代工业、国防和高科技领域
中不可缺少的设备,是电力拖动自动控制系统的一个重要分支。
1.2 位置随动系统的特点及品质指标
位置随动系统与拖动控制系统相比都是闭环反应控制系统,即通过对输出
量和给定量的比拟,组成闭环控制,这两个系统的控制原理是一样的。对于拖
动调速系统而言,给定量是恒值,要求系统维持输出量恒定,所以抗扰动性能
成为主要技术指标。对于随动系统而言,给定量即位置指令是经常变化的,是
一个随机变量,要求输出量准确跟随给定量的变化,因而跟随性能指标即系统
输出响应的快速性、灵敏性与准确性成为它的主要性能指标。位置随动系统需
要实现位置反应,所以系统构造上必定要有位置环。位置环是随动系统重要的
组成局部,位置随动系统的根本特征表达在位置环上。根据给定信号与位置检
测反应信号综合比拟的不同原理,位置随动系统分为模拟与数字式两类。总结
后可得位置随动系统的主要特征如下:
1.位置随动系统的主要功能是使输出位移快速而准确地复现给定位移。
2.必须具备一定精度的位置传感器,能准确地给出反映位移误差的电信
号。
3.电压和功率放大器以及拖动系统都必须是可逆的。
4.控制系统应能满足稳态精度和动态快速响应的要求,其中快速响应中,
更强调快速跟随性能。
1.3位置随动系统的根本组成
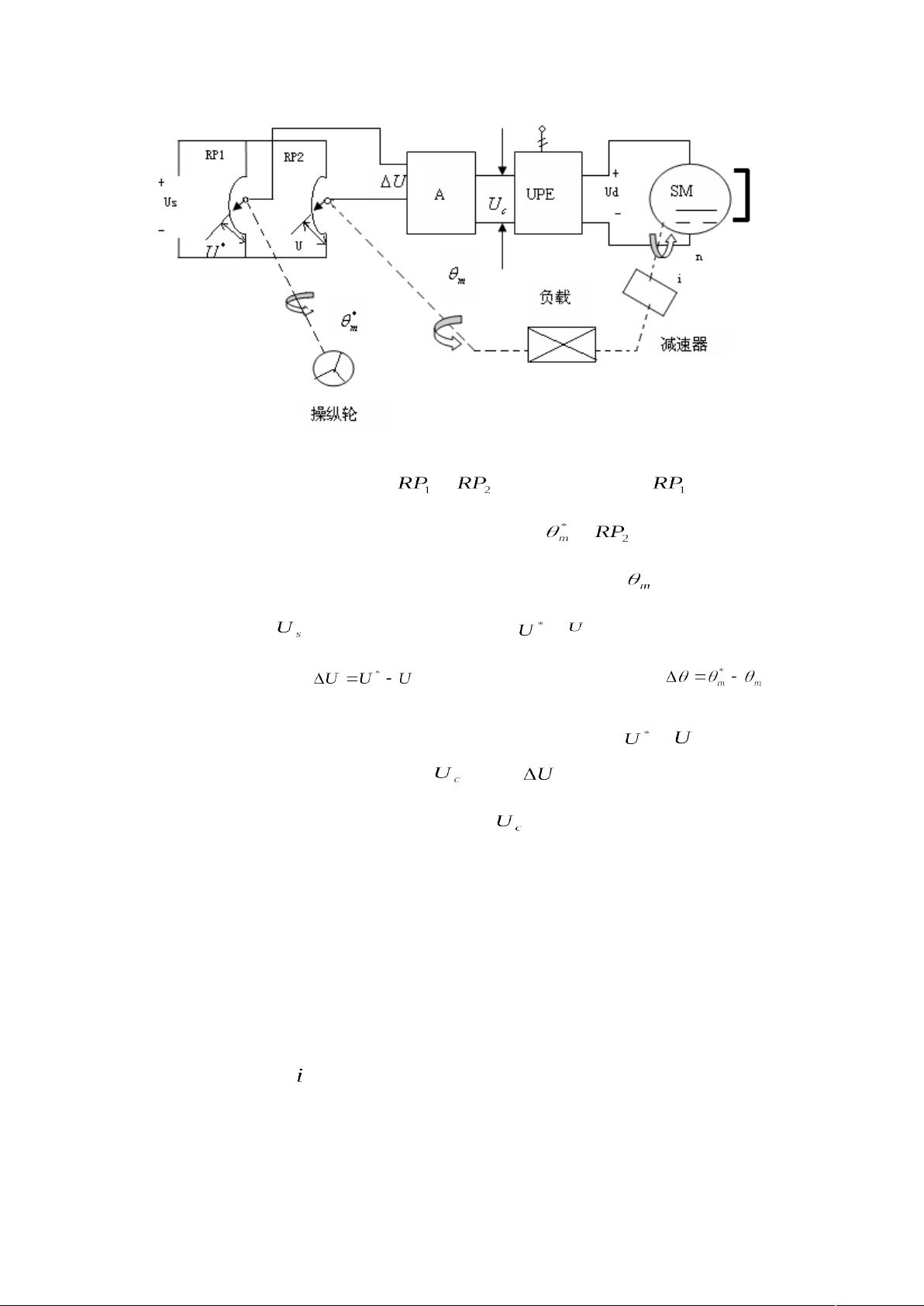
1.3.1 电位器式位置随动系统的组成
下面通过一个简单的例子说明位置随动系统的根本组成,其原理图如图1-
1所示。这是一个电位器式的小功率位置随动系统,有以下五个局部组成:
- - word.zl-

剩余16页未读,继续阅读
资源评论


gjmm89
- 粉丝: 15
- 资源: 19万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


