
RS485/云台控制(PTZ)学习文档
zxf
一.项目任务:
在 linux 环境下通过 RS485 串口实现对云台镜头的各种控制(包
括摄像头的打开,关闭,各个方向的运动及运动速度,预设点,自
动扫描,变倍,调焦,光圈,视角宽窄等等的各项控制)。
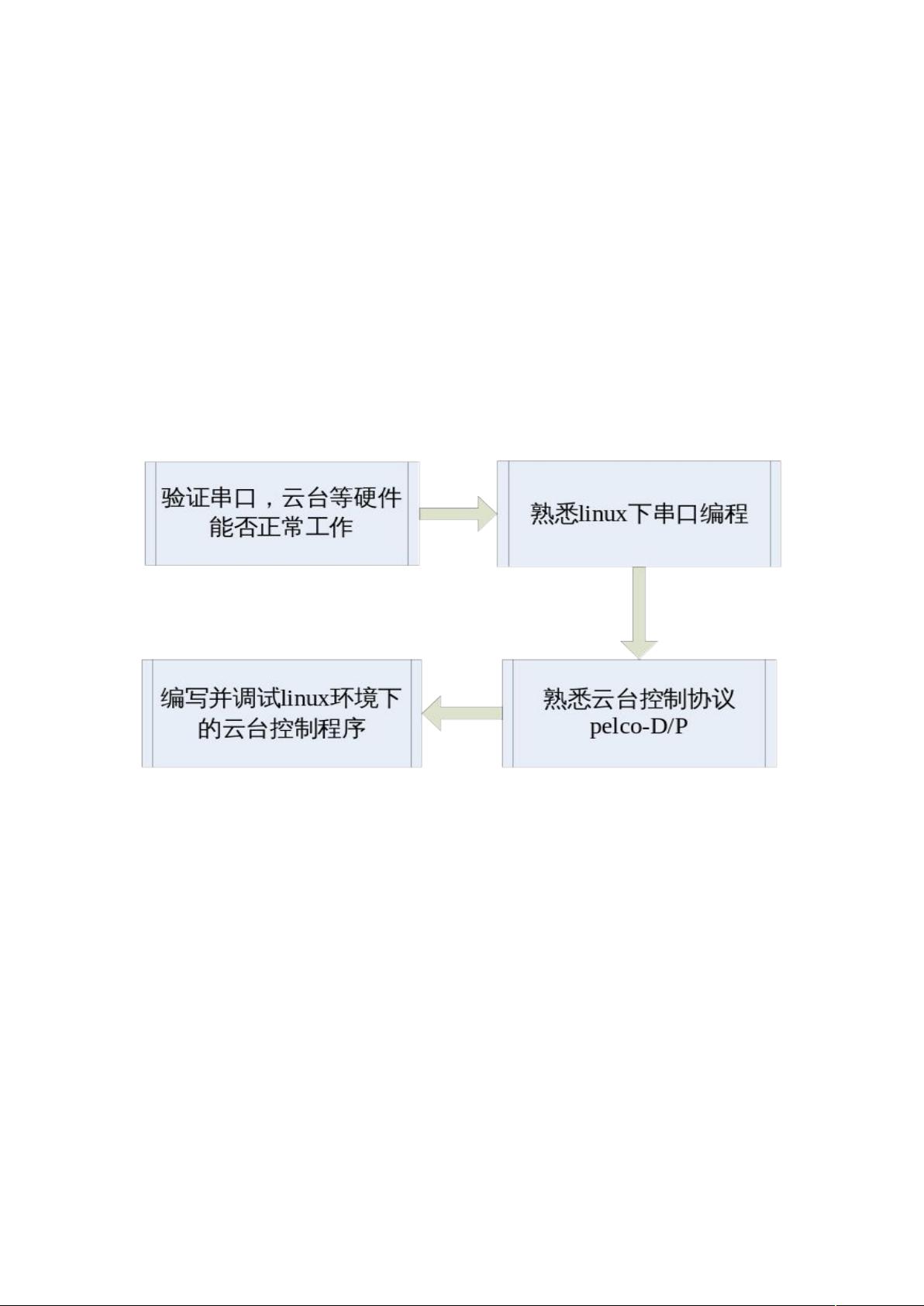
二.学习步骤
1.验证串口,云台等硬件
考 虑 先 在 windows 环 境 下 运 行 串 口 调 试 精 灵 等 软 件 , 采 用
RS232-RS485 的接口转换器将 PC 机与云台相连,通过串口调试精灵
向云台发送命令(根据具体云台所采用的协议 pelco-d 或是 pelco-
p),验证云台能否正常工作,以保证后续工作顺利进行。
2.熟悉 linux 下的串口编程
串口是电脑上一种很通用设备通信的协议,常用 PC 机上包含的


剩余15页未读,继续阅读













- 1
- 2
前往页