Sliding-Mode Rotor Position Observer of PMSM
需积分: 5 92 浏览量
2022-04-25
09:00:53
上传
评论
收藏 209KB PDF 举报

SMO Slidin
g
-Mode Rotor Position Observer of PMS
M
Des
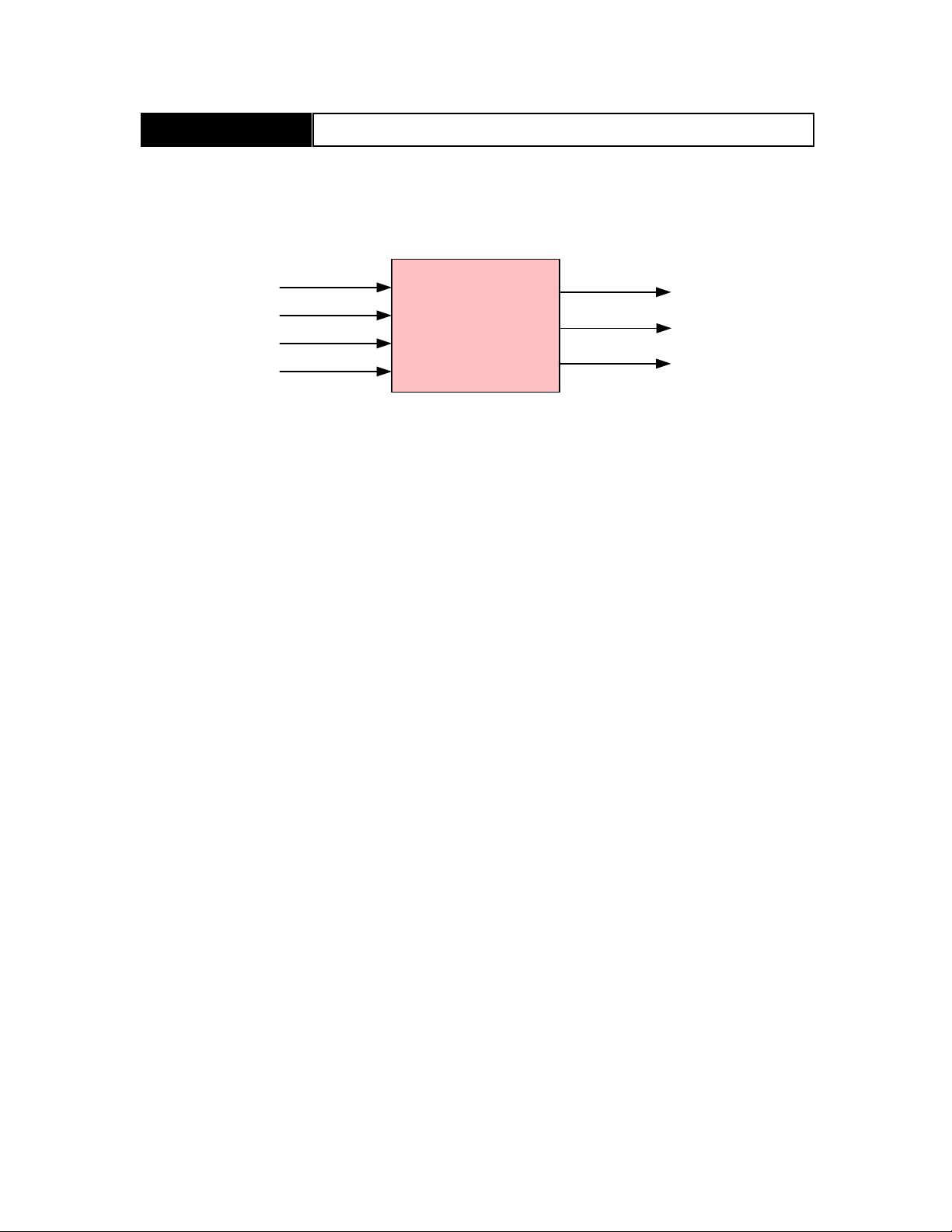
cription This software module implements a rotor position estimation algorithm
for Permanent-Magnet Synchronous Motor (PMSM) based on Sliding-
Mode Observer (SMO).
.
Valpha
Vbeta
Ibeta
Ialpha
SMO
pu
pu
pu
pu
pu
pu
pu
Theta
Zalpha
Zbeta
MACRO
Availability This IQ module is available in one interface format:
1) The C interface version
Module Properties Type: Target Independent, Application Dependent
Target Devices: 28x Fixed Point or Piccolo
C Version File Names: smopos.h
IQmath library files for C: IQmathLib.h, IQmath.lib
Digital Control Systems (DCS) Group 1
Texas Instruments


剩余11页未读,继续阅读
资源评论


eric_123321
- 粉丝: 4
- 资源: 9









最新资源
- CLShanYanSDKDataList.sqlite
- android应用商店
- btstack协议栈实战篇-HFP HF - Hands-Free
- MSFRosslerAll (2).for
- vs2022安装包在线安装包
- 项目实战:基于ASP.NET技术的网上图书订阅管理系统的设计与开发(程序源代码+毕业文档)
- Microsoft C++ 生成工具
- 基于SpringMVC+Bootstrap在线图书销售系统(PC端+server端源码+数据库SQL+演示讲解+毕业论文)
- 74LS190实现10以内、100以内十进制加/减计数器-由multisim软件电路仿真设计
- 毕业项目:网上图书订阅管理系统的设计与开发(ASP.NET技术+程序源代码+毕业文档)
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


