
FANUC 机器人编程与操作
实验二 FANUC 机器人编程与操作
一、 实验目的
1、 了解机器人的构成及各组成部分的作用与机器人的用途。
2、 掌握机器人的几种坐标系及功能。
3、 掌握机器人的编程方式及示教编程。
二、 实验设备
FANUC 机器人一台(含机械部分与控制部分)、气压站仪态、气动手抓器一个、合金铝块
6 块。
三、 实验原理
1、机器人的构成
机械本体:由6个关节组成,各环节每一个结合处就是一个关节点或坐标系。
动力部分:由6台伺服电机分别驱动各关节。
计算机控制部分:用户操作面板、I/O控制接口、示教操作盘、32位CPU。
2、机器人的用途
Arc welding(弧焊),Spot welding(点焊),Handing(搬运),Sealing(涂胶),Painting(喷
漆),去毛刺,切割,激光焊接、测量等、
四、 实验步骤
1、 熟悉机器人的各组成部分及各部分的功能。
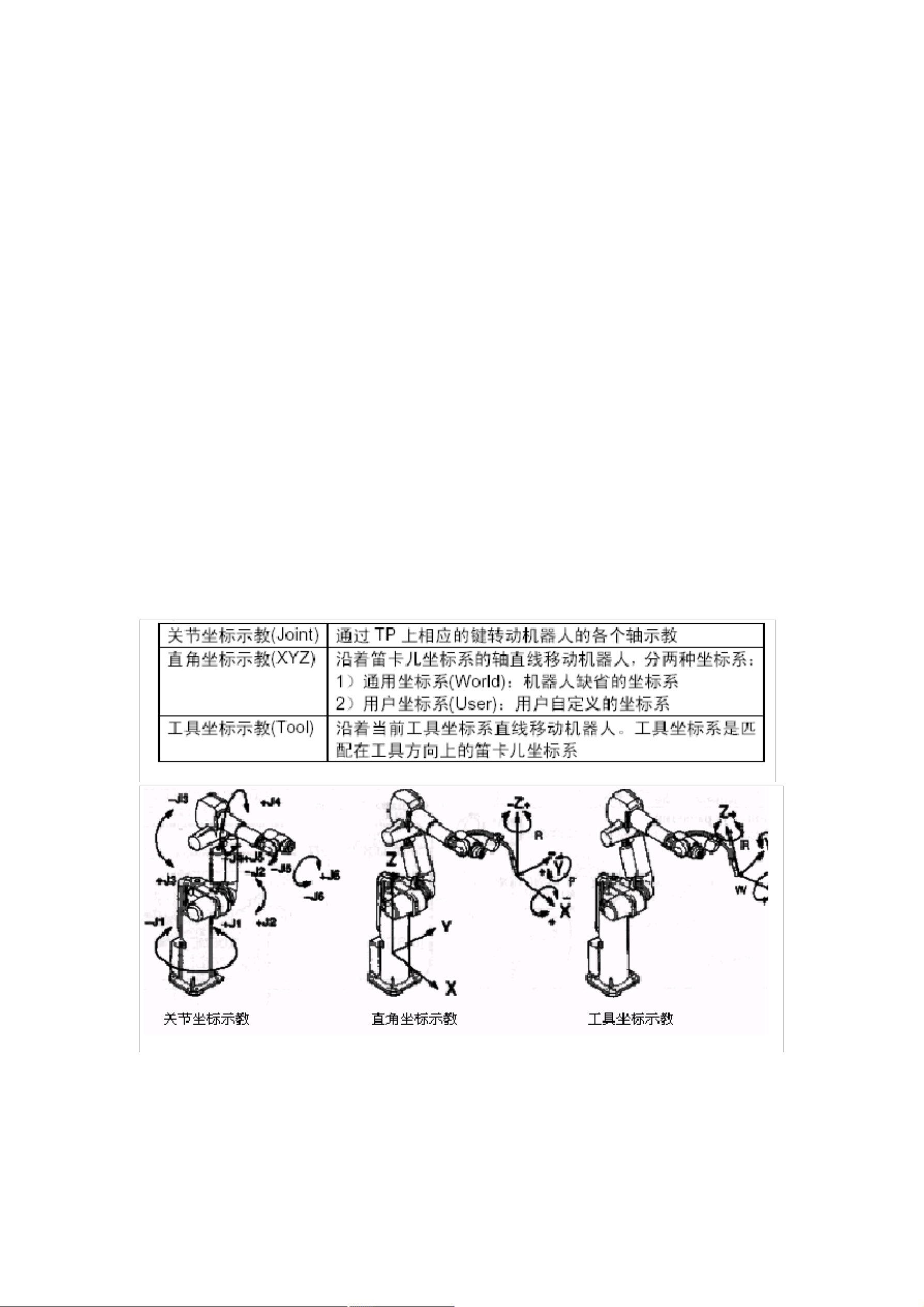
2、 熟悉机器人的各个坐标系及各坐标系的用途。
图 3-1 各坐标系示教
3、 熟悉控制面板 TP 的功能与各个键的作用。见图 3-2。
资源评论


苦茶子12138
- 粉丝: 1w+
- 资源: 7万+









最新资源
- Oracle10gDBA学习手册中文PDF清晰版最新版本
- 扒网站数据软件项目全套技术资料100%好用.zip
- AI爬虫项目全套技术资料100%好用.zip
- 倪海厦讲义及笔记,易学数据测算
- 智能图书管理系统项目全套技术资料.zip
- 基于java写的爬虫项目全套技术资料.zip
- 218) Leverage - 创意机构与作品集 WordPress 主题 2.2.7.zip
- 220) Vinkmag - 多概念创意报纸新闻杂志 WordPress v5.0.zip
- 219) Axtra - 数字机构创意作品集主题 v2.0.zip
- 217) Voice - 清洁新闻 - 杂志 WordPress 主题 v3.0.3.zip
- 215) Classiera – 分类广告 WordPress 主题 v4.0.28.zip
- 216) Creote - 企业与咨询业务 WordPress 主题 v2.7.8.zip
- 212) Outgrid - 多用途 Elementor WordPress 主题 v2.0.0.zip
- 213) Blacksilver - 摄影 WordPress 主题 v9.4.zip
- 214) Nokri - 招聘板 WordPress 主题 v1.5.9.zip
- 211) TopDeal - 多供应商市场 WordPress 主题(移动布局就绪) v2.3.15.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


