

简易智能电动车---软件部分
计算机科学与技术 02 级(1)班 陈 催
指导教师:夏新恩教授、苏祖全助教
(韶关学院 计算机科学系,广东,韶关,…)
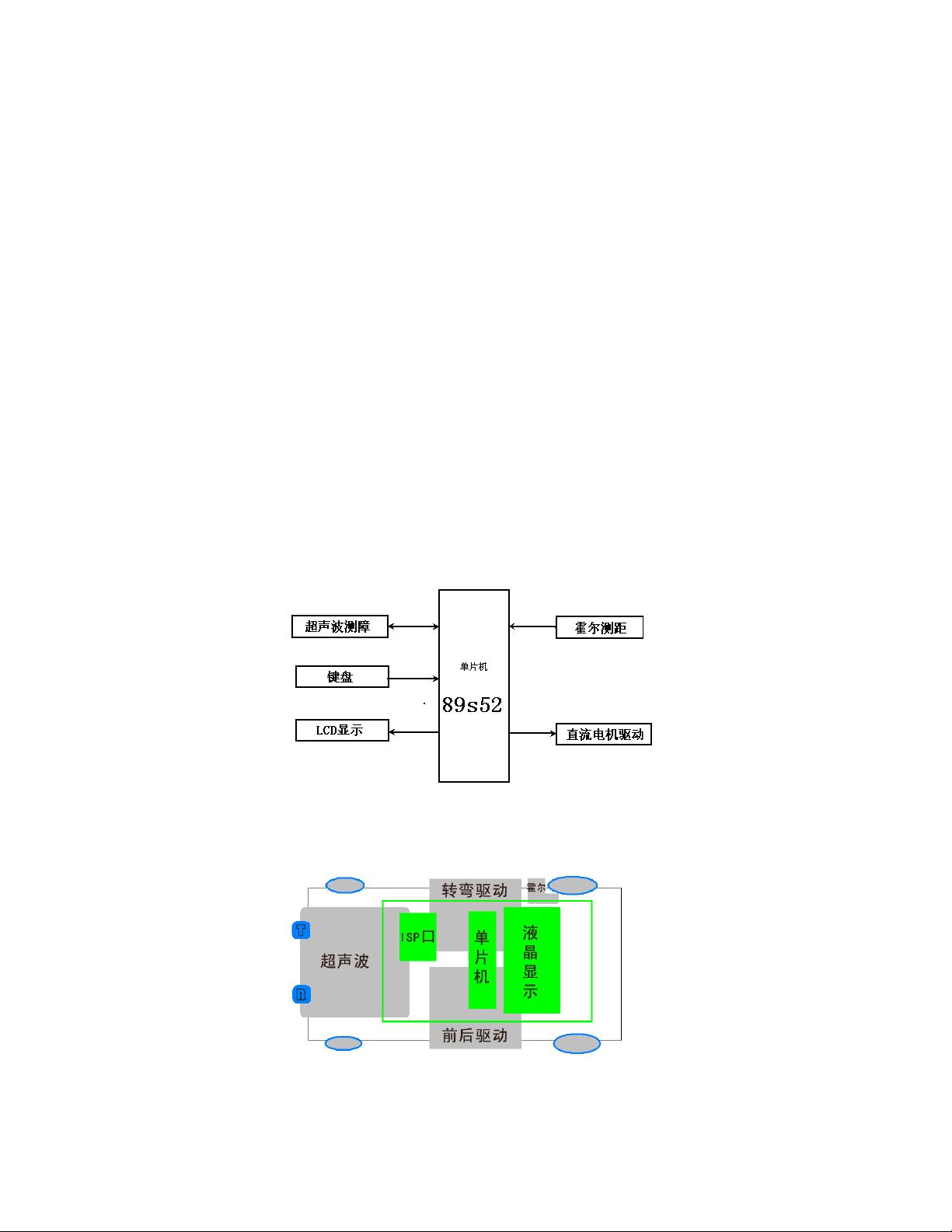
摘 要:本系统采用 51 系列单片机作为简易智能电动车的检测和控制核心,通过超声波传感器、
霍尔元件、直流电机对小车的位置和状态进行监控,从而实现小车前后行走、左右转弯、避障
碍物、显示行走距离,速度等功能。
关键词:LCD 显示;霍尔元件数据处理;定时;计数
前言:
“智能电动车”属于机器人技术范畴,它涵盖了机器人技术的相关知识,包括机械系统构建、
控制系统硬件配置、传感技术、控制算法的程序编制等。因为简易智能电动车的规模较小,制
作成本相对够低,但对电动车的研发却具有极其重要的意义,使人们能更好地了解机器人真正
含义,更便利地对机器人进行研究。中国“嫦娥探月”计划的第二期工程将对月球着陆探测,只
要对智能电动车进行更深入的研究和改进,即可变成探月车。其次,通过这个项目的制作,可
以提高自己的实际动手能力和设计经验。
“智能电动车”运用单片机和光电传感器控制电动车运动。通过设计传感器检测程序和运动控
制程序,使电动车具有智能化的运动功能,达到模拟汽车按一定的轨迹运行的能力。该课题属
于机器人应用范畴,具有较好的应用前景。
0 设计功能及要求
通过设计传感器检测程序和运动控制程序,使电动车具有智能化的运动功能,达到模拟汽
车按一定的轨迹运行的能力。
要求实现的基本功能:
1)能前后行走
2)左右转弯
3)避障碍物
4)显示行走距离,速度
1 方案的选择与论证
根据设计要求,对方案进行选择与论证.
1.1 方案论证:
1) 控制模块
方案一:采用凌阳单片机。虽然它是32位的处理器,处理速度快,资源多,但它的成本
高。
方案二:采用51系列单片机。51系列的单片机价格低,使用较方便,且资源也足够实现
小车的功能。
综上采用方案二。
2) 小车驱动模块
方案一:采用步进电机来控制小车的转向。由于小车的底座是由玩具车改装而成,所以安
装步进机和用步进机实现小车的转弯有相当的困难。且步进机的机身较重,这会加大小车的重
量。
方案二:采用左右双直流驱动电机控制方式。改装的玩具车在车尾和车头各有一直流电机 。
再加上 H 型驱动电动,能实现后轮的前后行走和前轮左右转弯。其优点在于驱动力大,并且
小车的行走状态较容易控制。
综上采用方案二。
3) 小车的避障模块
1
剩余7页未读,继续阅读
资源评论


ccdongsky
- 粉丝: 0
- 资源: 1









最新资源
- 你的第一个博客-全套运行代码
- Node.JS网盘系统
- 车辆、飞机、船检测22-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 时间转换工具(BD时、GPS时、UTC时、北京时间相互转换,可计算日期)
- 坐标转换工具(LBH、XYZ、NEH互相转换,可批量)
- VueWeb 管理系统完成示例(登录、列表、详情、echars图表、地图)
- 车辆、飞机、船检测13-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 基于51单片机的空气质量烟雾可燃气体检测系统.zip
- 免费DS18B20温度传感器+STM32+Keil
- 目标检测数据集:鸟图像检测数据【VOC标注格式、包含数据和标签】
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


