

简易智能电动车( 题)设计与总结报告示例
(以下是一个实际的简易智能电动车( 题)设计与总结报告)
简易智能电动车( 题)
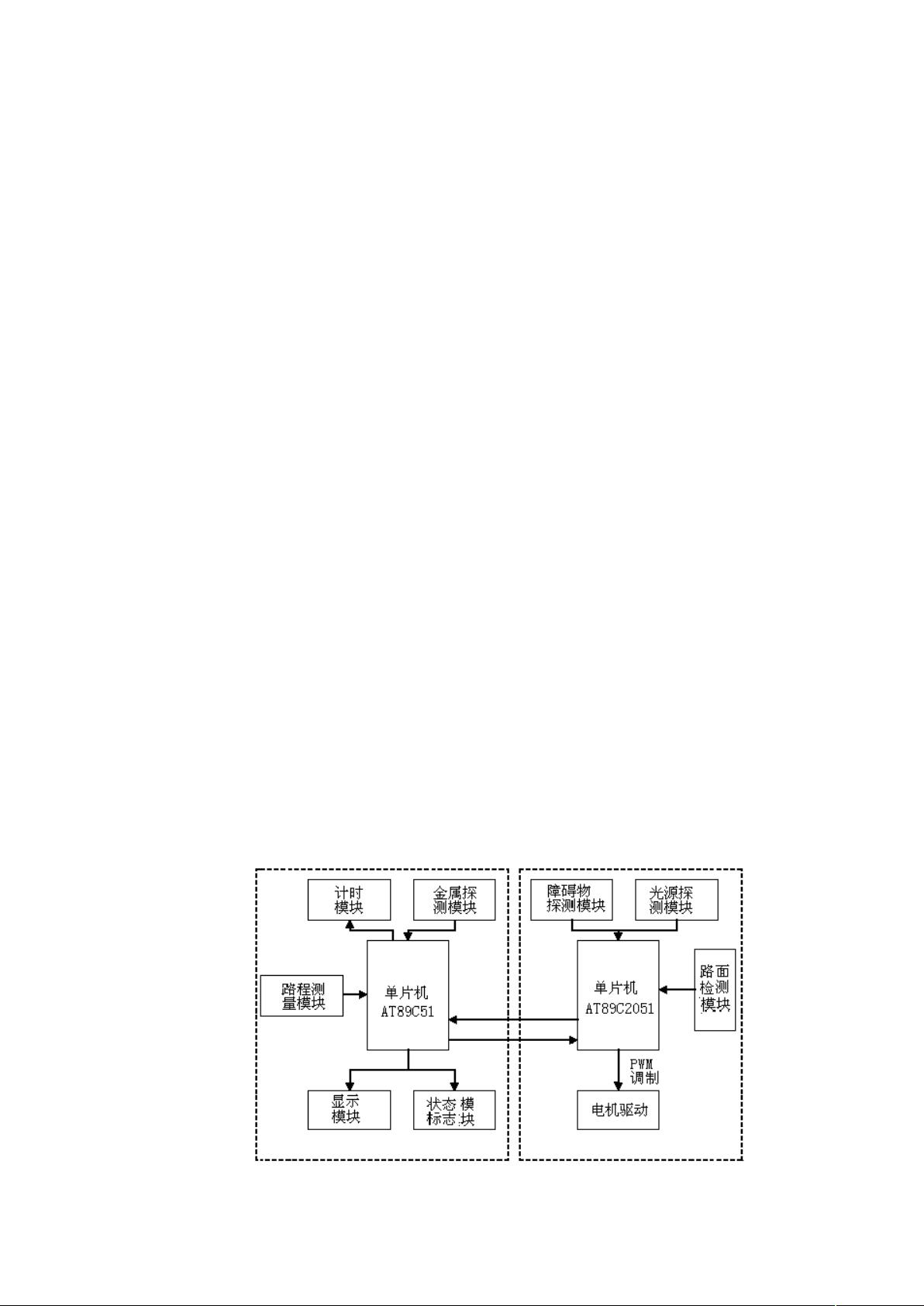
摘要:本设计采用两块单片机( 和 )作为智能小车的检测和控制核心,
实现小车识别路线、判断并自动躲避障碍、选择正确的行进路线、寻找光源等功能。引导方式采
用反射式光电传感器感知与地面颜色有较大差别的导引线,障碍判断采用超声波传感器。驱动电
机采用直流电机,电机控制方式为单向 控制。电机控制核心采用 单片机,控
制系统与电路用光电耦合器完全隔离以避免干扰。控制上采用分时复用技术对系统进行优化。
关键词:智能控制 光电检测 脉宽调制 电动车
!" #
Abstract : $%! & !'%'(
%%%)#)#%*! ( "+,-.%
!! !' % % #%* !' % %- !! ! %
%!$) " (!)!'&%%#
/ /!)%%)%!)
Key word: ) ',-.%!! !'' !
%" #
(注意:以上内容在实际论文中为一页)
目 录
系统方案选择和论证…………………………………………………………………………0
题目要求…………………………………………………………………………………0
65


剩余30页未读,继续阅读
资源评论


等天晴i
- 粉丝: 5858
- 资源: 10万+









最新资源
- Screenshot_20241116_215300_com.baidu.netdisk.jpg
- java医院人事管理系统源码数据库 MySQL源码类型 WebForm
- 道路养护病害数据集-含原图和标签
- 2023-04-06-项目笔记 - 第三百一十九阶段 - 4.4.2.317全局变量的作用域-317 -2025.11.16
- 2023-04-06-项目笔记 - 第三百一十九阶段 - 4.4.2.317全局变量的作用域-317 -2025.11.16
- 1503ANDH1503002016_20241116222825
- 时间序列-黄金-15秒数据
- C#HR人事管理系统源码数据库 MySQL源码类型 WebForm
- C#CS餐饮管理系统源码数据库 SQL2008源码类型 WinForm
- 蛾类识别系统(深度学习+UI可视化)
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


