没有合适的资源?快使用搜索试试~
我知道了~
文库首页
网络技术
系统集成
库卡机器人坐标系设置大全
库卡机器人坐标系设置大全
需积分: 2
13 下载量
26 浏览量
2023-04-20
20:10:14
上传
评论
收藏
2.58MB
PPTX
举报
温馨提示
立即下载
库卡机器人坐标系设置
资源推荐
资源详情
资源评论
KUKA机器人通过修改config配置文件修改目标点位坐标数据的具体方法.docx
浏览:137
5星 · 资源好评率100%
KUKA机器人通过修改config配置文件修改目标点位坐标数据的具体方法
KUKA机械人_KCP操作及坐标系系统
浏览:186
KUKA机械人_KCP操作及坐标系系统
实操:KUKA机器人创建工具坐标数据编程资料
浏览:126
实操:KUKA机器人创建工具坐标数据
KUKA机器人初级编程
浏览:43
5星 · 资源好评率100%
坐标系系统,零点标定,运动编程,逻辑编程,夹爪编程,子程序编程等等
库卡机器人大全
浏览:29
库卡机器人资料大全 给广大爱好者一个分享
KUKA机器人通过3点法设置工作台基坐标系的具体方法.docx
浏览:139
KUKA机器人通过3点法设置工作台基坐标系的具体方法
工业机器人工具坐标系的设置.pdf
浏览:176
#资源达人分享计划#
库卡机器人选型手册大全.pdf
浏览:186
5星 · 资源好评率100%
库卡机器人选型手册大全
工业机器人操作与维护 4-2-1-1工具坐标系--设置工具坐标系-测试题.docx
浏览:49
工业机器人操作与维护 4-2-1-1工具坐标系--设置工具坐标系-测试题.docx 学习资料 复习资料 教学资源
KUKA机器人查看当前实际位置的具体方法示例.docx
浏览:129
KUKA机器人查看当前实际位置的具体方法示例
kuka机器人试题.doc
浏览:178
5星 · 资源好评率100%
1. 哪个图标代表世界坐标系? 2. 手动移动的速度设置叫什么? 3. 有哪些运行方式? 4. 零点标定目的是什么? 6. 请给出机械零位时的所有 6 根轴的角度。 A1: .............................. A2: ...................
KUKA常用指令集合,方便交流
浏览:8
5星 · 资源好评率100%
KUKA机器人指令集合,中断程序、偏移、高级指令、带参数程序
KUKA机器人基本手动操作.pdf
浏览:13
5星 · 资源好评率100%
坐标系状态:此为轴坐标系 6 个运动键:此为 6 个轴 手动速率按键 主菜单 6、 等示教器屏幕熄灭后再将控制柜开关旋为"OFF"状态,最后关闭电源总开 关。 关机时将这两个勾选上,如果无法选 择请切换用户组权限, 密码...
机器人穿法-机器人工具坐标系的设置与使用(六点示教法).pdf
浏览:173
机器⼈穿法_机器⼈⼯具坐标系的设置与使⽤(六点⽰教法) 六点⽰教法包括六点(XY)⽰教法、和六点(XZ)⽰教法。 六点(XZ)⽰教法中,取⼀个⽅向原点、⼀个与所需⼯具坐标系平⾏的X轴⽅向点、⼀个XZ平⾯上的点。此时,通过笛卡尔点动或⼯具点动 进⾏⽰教,以使⼯具的倾斜保持不变。 步骤: 1.按下 [MENU] (菜单)键,显⽰出画⾯菜单。 2.选择" 设定 ",光标右移选择 " 坐标系 "。出现⼯具
工业机器人操作与维护 4-2-2-1工件坐标系--设置工件坐标系-测试题.docx
浏览:166
工业机器人操作与维护 4-2-2-1工件坐标系--设置工件坐标系-测试题.docx 学习资料 复习资料 教学资源
库卡机器人krc4报警代码大全.docx
浏览:62
5星 · 资源好评率100%
库卡机器人krc4报警代码大全全文共1页,当前为第1页。库卡机器人krc4报警代码大全全文共1页,当前为第1页。库卡机器人krc4报警代码大全 库卡机器人krc4报警代码大全全文共1页,当前为第1页。 库卡机器人krc4报警代码大全全文共1页,当前为第1页。 ERROR 105 由刻度调节引起的急停。刻度调节软键被压\退出校正菜单,按压取消键两次 ERROR 108 动力制动激活。 ERROR 1
FANUC机器人_三点法设置工具坐标系的具体方法步骤.docx
浏览:63
FANUC机器人_三点法设置工具坐标系的具体方法步骤
库卡机器人通讯分类大全
浏览:69
库卡机器人通讯分类,通讯类别
库卡KUKA 机器人仿真软件simpro教程.pdf
浏览:150
5星 · 资源好评率100%
夹笔 a、先点程序-(若要写程序、左上⾓点动) 准备⼯作: 1、创建⼯具坐标系, 步骤: a、选中机器⼈,右下⾓的点动 b、基座表 ⼯具坐标–选⼀个tooldate1–右《选择》–点左上⾓《捕捉》–夹具>>两点法(设置+Y)...
机器人运动学分析
浏览:18
机器人运动学的分析是研究机器人控制的基础,能够保证机器人的控制化程度。以库卡机器人为例,建立D-H坐标系,对它进行运动学正反解,用MATLAB辅助计算。
库卡KRC4系列机器人首次开机启动软硬件设置.ppt
浏览:154
库卡KRC4系列机器人首次开机启动软硬件设置
FANUC机器人使用三点示教法设置用户坐标系的具体步骤.docx
浏览:141
5星 · 资源好评率100%
FANUC机器人系统,介绍了用户坐标系的原理和使用方法,使用三点法设定机器人坐标系,详细介绍了设定的具体步骤和内容。
TSMaster下载地址(免费在线升级)
浏览:145
TSMaster是同星智能推出的虚拟仪器软件平台,可连接、配置并控制所有的同星硬件工具、设备,实现汽车总线监控、仿真、诊断、标定、BootLoader、I/O控制、测量测试、EOL等多种场合的功能需求。 同时,TSMaster支持Vector、Kvaser、PCAN、英特佩斯、周立功总线系列产品硬件及市场上主流的仪器(示波器、波形发生器、数字万用表等)、板卡(AI、D
PSASP 7.4.1 安装包附教程
浏览:84
4星 · 用户满意度95%
PSASP 7.4.1 安装包
Axure9元件库大合集
浏览:46
我收集的Axure的各种元件库大合集,绝对超值,有element ui,ant design ,axureux, 收集与各大网站。现在一起打包。 我收集的Axure的各种元件库大合集,绝对超值,有element ui,ant design ,axureux, 收集与各大网站。现在一起打包。 我收集的Axure的各种元件库大合集,绝对超值,有element ui,ant design ,axureu
ensp典型三层架构校园网络搭建(文档+拓扑)
浏览:134
5星 · 资源好评率100%
该网络是一个典型的校园网络架构,采用华为ensp模拟器搭建。该压缩包中包含网络工程拓扑文件和项目报告文档,报告文档包含设计思路、网络规划、配置步骤及代码、网络功能测试等。该项目中涉及的技术包括,VLAN、链路聚合、DHCP、OSPF、缺省路由、VRRP、MSTP、ACL、NAT、DNS、FTP、WEB、无线WLAN、防火墙的相关配置等内容,功能自认为非常全面,需要做课设的和毕设的可以参考,不想动手
Labview串口驱动-NIVISA 1800full
浏览:182
①本资源是NI Labiew的串口驱动插件,支持任何版本的Labview串口驱动识别,适用于Labview无法识别串口,无法编程串口的情况下。 ②本串口驱动安装过程简单,安装后无需后续操作即可完成串口识别。
modbus tcp例程
浏览:98
基于NModbus的C# modbus tcp例程,VS2019环境调试
最新版本华为存储模拟器OceanStor eStor合集
浏览:112
最新版本华为存储模拟器OceanStor eStor合集 EulerOS.x86_64_SVP.zip FusionCompute_OceanStor_eStor_V1R1C00T10_single_controller.zip HUAWEICLOUD_OceanStor_eStor_V1R1C00T10_single_controller.zip License.zip Vmware_Ocean
WORLD 世界坐标系
ROBROOT 机器人足部坐标系
BASE 基坐标系
FLANGE 法兰坐标系
TOOL 工具坐标系
JOINT 关节坐标系
坐标系
与机器人相关的坐标系有:
Jog keys
微动键
Space Mouse
手轮
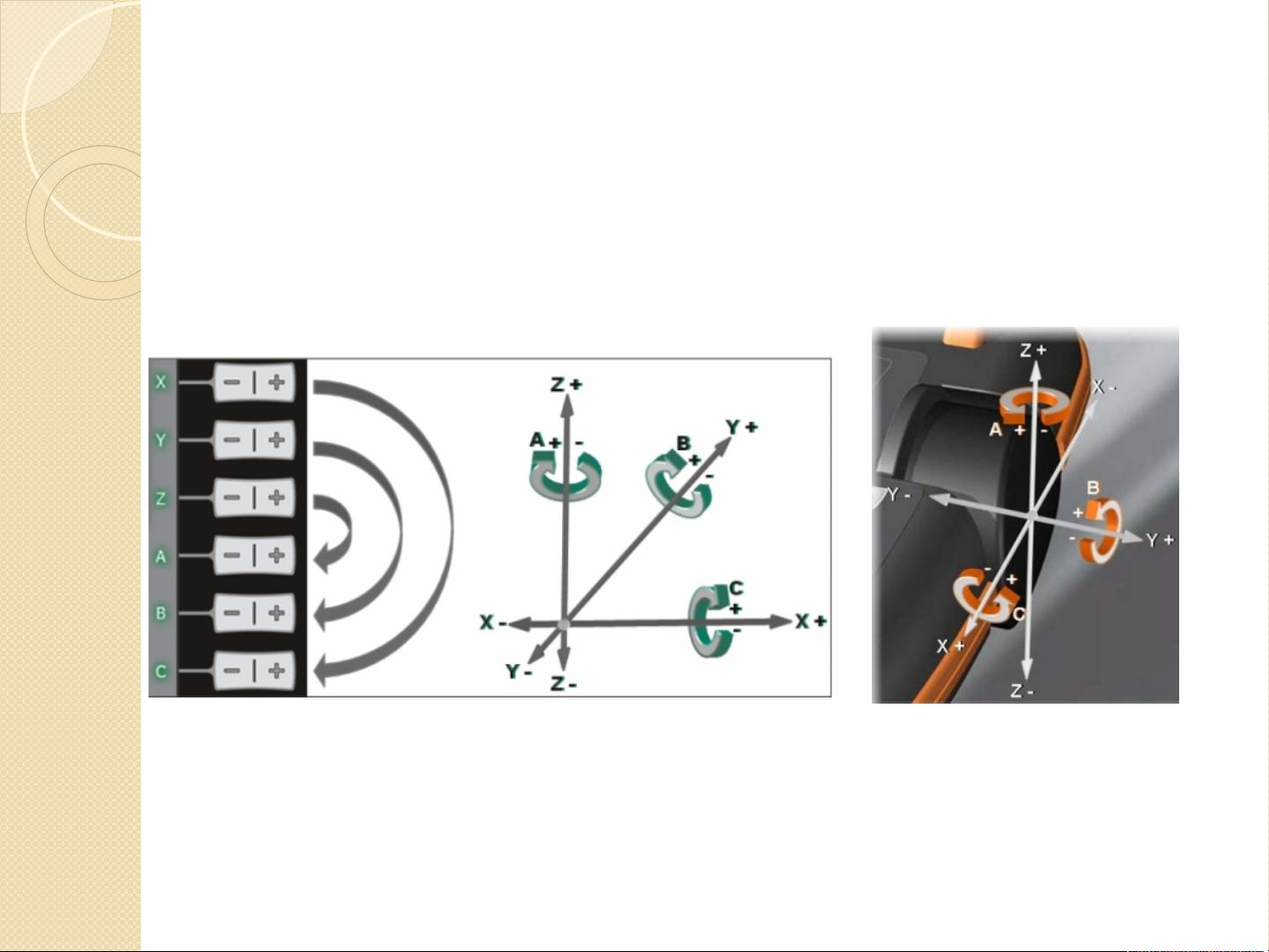
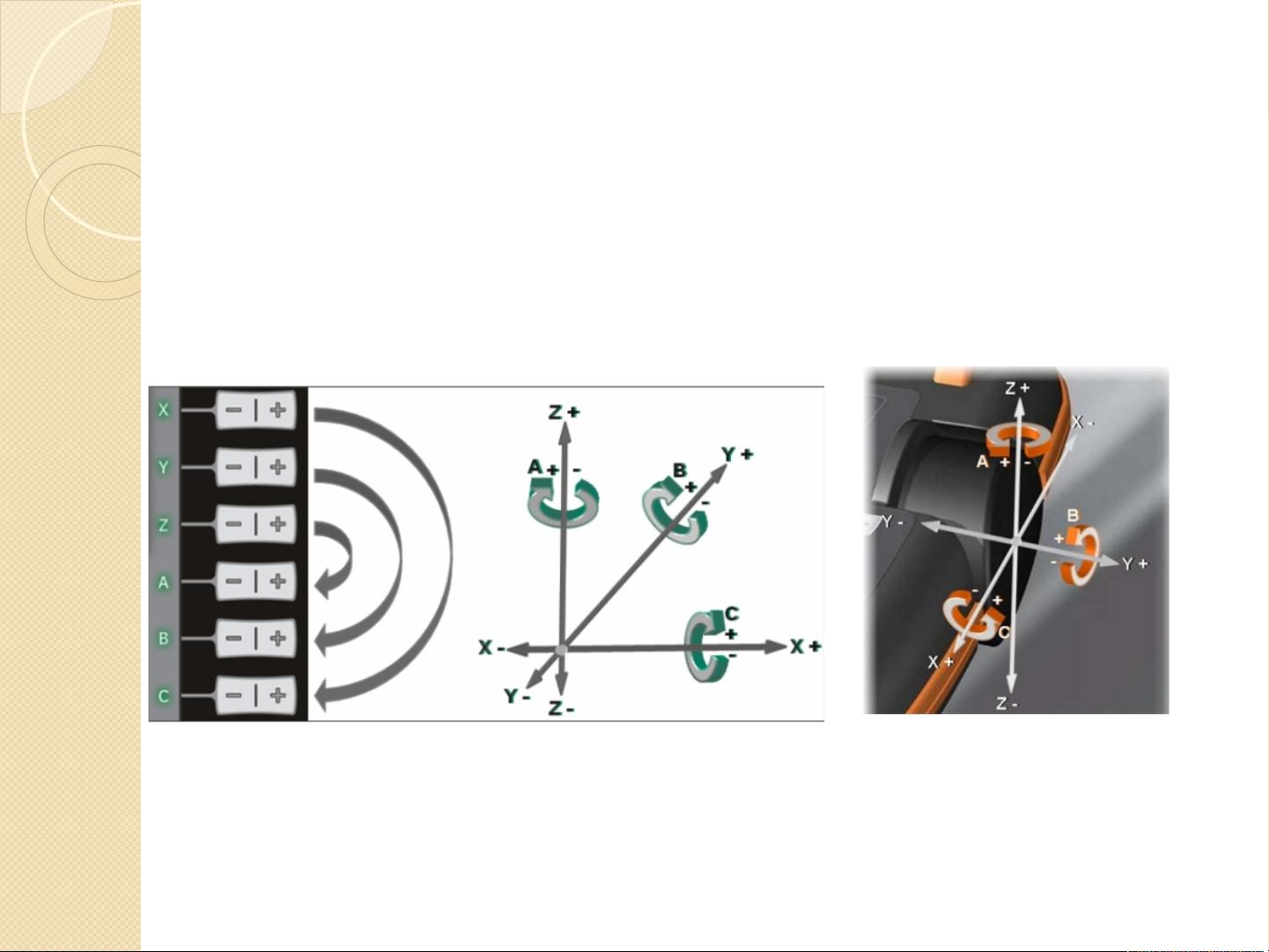
JOINT
坐标系统
在
JOINT
坐标中,每一机械轴线可以单独在轴线的正负方向移动。可以使用微
动键或手轮。
Jog keys
微动键
Space Mouse
手轮
WORLD坐标系
WORLD参考坐标轴系统是绝对坐标(固定不变),当设备移动时参考坐标系的
原点保持在同一位置,不随设备移动而移动。 交货时,WORLD 坐标系原点位于设
备的底座上。
Space Mouse
手轮
BASE坐标系
BASE
坐标系是直角坐标,笛卡儿坐标系,其原点位于外部工具。交货时,
BASE
坐标系原点位于设备的底座上。
Jog Keys
微动键
剩余15页未读,
继续阅读
评论
收藏
内容反馈
立即下载
资源评论
资源反馈
评论星级较低,若资源使用遇到问题可联系上传者,3个工作日内问题未解决可申请退款~
联系上传者
评论
博学纪年
粉丝: 0
资源:
36
私信
上传资源 快速赚钱
我的内容管理
展开
我的资源
快来上传第一个资源
我的收益
登录查看自己的收益
我的积分
登录查看自己的积分
我的C币
登录后查看C币余额
我的收藏
我的下载
下载帮助
前往需求广场,查看用户热搜
最新资源
网络TCP/IP如何创建网站 用途创建一个网站
Commons-io-2.16.2 压缩包
b85主板刷BIOST升级支持NVm.2硬盘
Python实现股市情感分析源代码+文档说明(高分项目期末大作业&课程设计)
Python版股市情感分析源代码+文档说明(高分项目期末大作业&课程设计)
apache-tomcat-8.5.31.tar.gz
IEEE三机九节点电路(IEEE 3-machine 9-bus system)simulink模型(完美运行)
测试投屏延迟的网页(一个页面两个毫秒级时钟)
WordPress轻盈美观主题Argon
hex,查看字符流或文件的16进制值
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈
安全验证
文档复制为VIP权益,开通VIP直接复制
信息提交成功