A Real-Time Detection Method for Picking Robot Based on YOLOv 5
需积分: 0 13 浏览量
2024-01-03
08:14:54
上传
评论
收藏 7.89MB PDF 举报


remote sensing
Article
A Real-Time Apple Targets Detection Method for Picking Robot
Based on Improved YOLOv5
Bin Yan
1,2
, Pan Fan
1,2
, Xiaoyan Lei
1,2
, Zhijie Liu
1,3
and Fuzeng Yang
1,3,4,
*
Citation: Yan, B.; Fan, P.; Lei, X.; Liu,
Z.; Yang, F. A Real-Time Apple
Targets Detection Method for Picking
Robot Based on Improved YOLOv5.
Remote Sens. 2021, 13, 1619. https:
//doi.org/10.3390/rs13091619
Academic Editor: Gemine Vivone
Received: 20 March 2021
Accepted: 19 April 2021
Published: 21 April 2021
Publisher’s Note: MDPI stays neutral
with regard to jurisdictional claims in
published maps and institutional affil-
iations.
Copyright: © 2021 by the authors.
Licensee MDPI, Basel, Switzerland.
This article is an open access article
distributed under the terms and
conditions of the Creative Commons
Attribution (CC BY) license (https://
creativecommons.org/licenses/by/
4.0/).
1
College of Mechanical and Electronic Engineering, Northwest A&F University, Yangling 712100, China;
[email protected] (Z.L.)
2
Shannxi Key Laboratory of Apple, Yangling 712100, China
3
Apple Full Mechanized Scientific Research Base of Ministry of Agriculture and Rural Affairs,
Yangling 712100, China
4
State Key Laboratory of Soil Erosion and Dryland Farming on Loess Plateau, Yangling 712100, China
* Correspondence: [email protected]
Abstract:
The apple target recognition algorithm is one of the core technologies of the apple picking
robot. However, most of the existing apple detection algorithms cannot distinguish between the
apples that are occluded by tree branches and occluded by other apples. The apples, grasping
end-effector and mechanical picking arm of the robot are very likely to be damaged if the algorithm
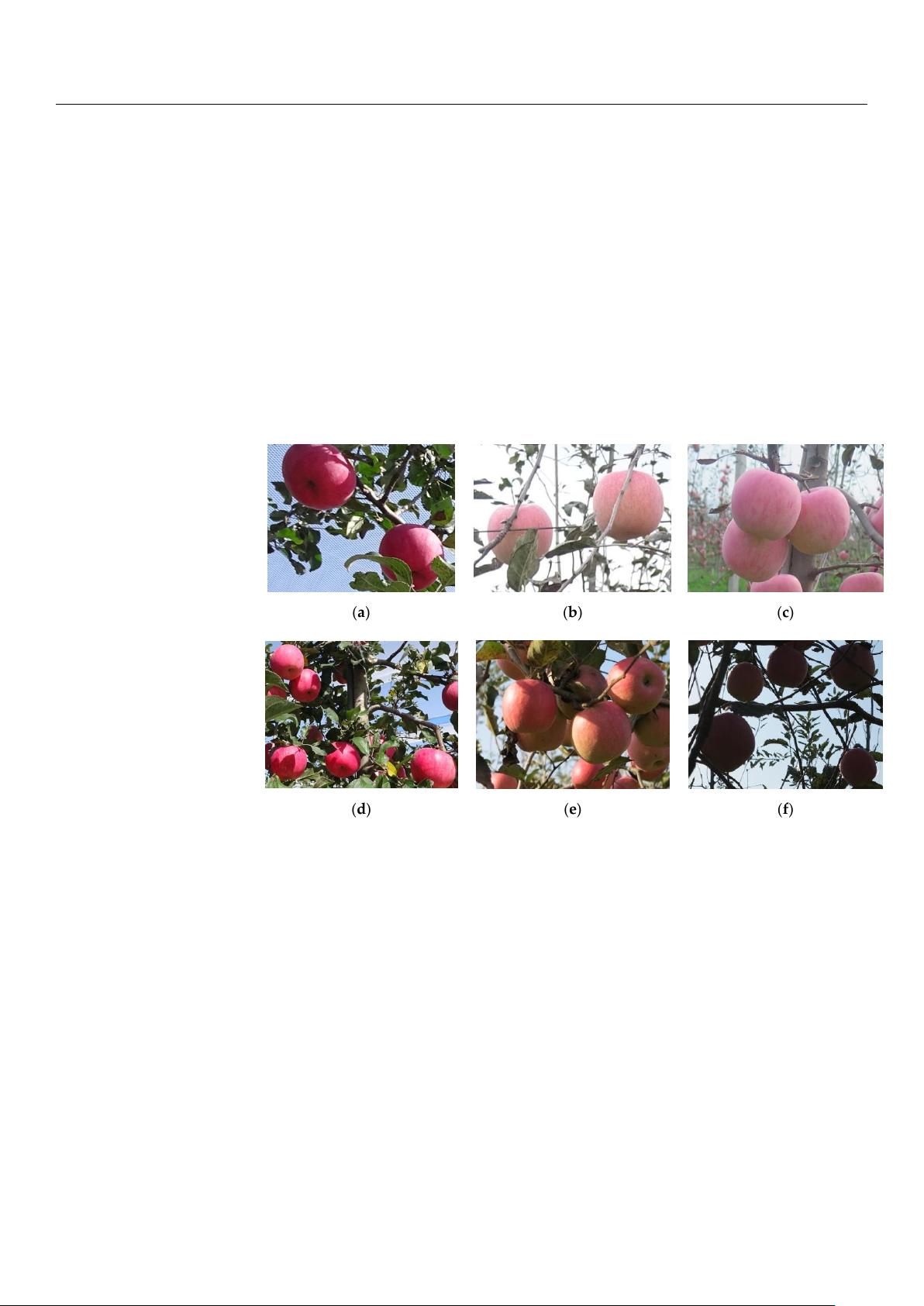
is directly applied to the picking robot. Based on this practical problem, in order to automatically
recognize the graspable and ungraspable apples in an apple tree image, a light-weight apple targets
detection method was proposed for picking robot using improved YOLOv5s. Firstly, BottleneckCSP
module was improved designed to BottleneckCSP-2 module which was used to replace the Bot-
tleneckCSP module in backbone architecture of original YOLOv5s network. Secondly, SE module,
which belonged to the visual attention mechanism network, was inserted to the proposed improved
backbone network. Thirdly, the bonding fusion mode of feature maps, which were inputs to the
target detection layer of medium size in the original YOLOv5s network, were improved. Finally,
the initial anchor box size of the original network was improved. The experimental results indi-
cated that the graspable apples, which were unoccluded or only occluded by tree leaves, and the
ungraspable apples, which were occluded by tree branches or occluded by other fruits, could be
identified effectively using the proposed improved network model in this study. Specifically, the
recognition recall, precision, mAP and F1 were 91.48%, 83.83%, 86.75% and 87.49%, respectively.
The average recognition time was 0.015 s per image. Contrasted with original YOLOv5s, YOLOv3,
YOLOv4 and EfficientDet-D0 model, the mAP of the proposed improved YOLOv5s model increased
by 5.05%, 14.95%, 4.74% and 6.75% respectively, the size of the model compressed by 9.29%, 94.6%,
94.8% and 15.3% respectively. The average recognition speeds per image of the proposed improved
YOLOv5s model were 2.53, 1.13 and 3.53 times of EfficientDet-D0, YOLOv4 and YOLOv3 and model,
respectively. The proposed method can provide technical support for the real-time accurate detection
of multiple fruit targets for the apple picking robot.
Keywords:
artificial intelligence; convolutional neural network; YOLOv5; object detection; apple
picking robot; lightweight; real-time detection
1. Introduction
Artificial apple picking is a labor-intensive and time-intensive task. Therefore, in
order to realize the efficient and automatic picking of apples, to ensure timely harvest of
mature fruits, and improve the competitiveness of the apple market, further study of the
key technologies of the apple picking robot is essential [
1
,
2
]. The intelligent perception
and acquisition of apple information is one of the most critical technologies for the apple
picking robot, which belongs to the information perception of the front-end part of the
Remote Sens. 2021, 13, 1619. https://doi.org/10.3390/rs13091619 https://www.mdpi.com/journal/remotesensing

剩余22页未读,继续阅读
资源评论













