
目前工作进度
1.完成纯惯导解算部分
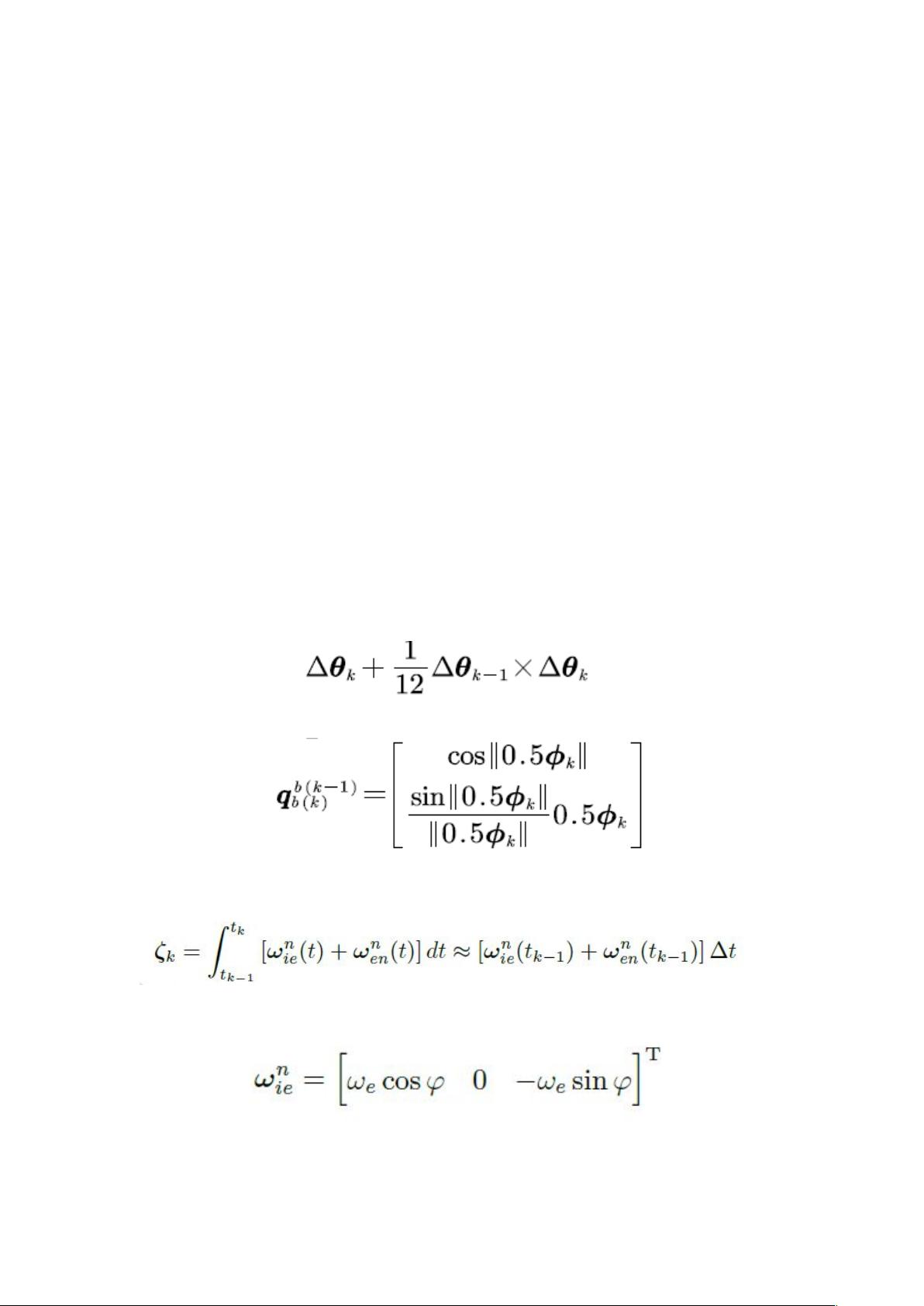
姿态更新
使用四元数进行姿态更新,已知量是前一时刻用四元数表示的姿态、当前及前一时刻的陀
螺角增量输出,待求量是当前时刻用四元数表示的姿态。
求取等效旋转矢量
表示 b 系姿态变化的等效旋转矢量使用双子样计算式求取:
随后可求得对应的姿态四元数:
表示 n 系姿态变化的等效旋转矢量使用下式求取:
其中 wnie 表达式如下:
,wnen 表达式如下:

剩余7页未读,继续阅读

十八与她
- 粉丝: 1265
- 资源: 37









最新资源
- 技术资料分享mp1482非常好的技术资料.zip
- 技术资料分享MAX811T非常好的技术资料.zip
- 技术资料分享KXTE9-2050 Specifications Rev 3非常好的技术资料.zip
- 技术资料分享K9F2G08非常好的技术资料.zip
- 技术资料分享K4T1G164QE非常好的技术资料.zip
- 技术资料分享HLY070ML226-12A非常好的技术资料.zip
- 技术资料分享FT5x06-1005-DataSheet非常好的技术资料.zip
- 技术资料分享FORESEE 4GB eMMC Spec A4-120210非常好的技术资料.zip
- 技术资料分享FE2.1-Data-Sheet-(Rev.-1.01)非常好的技术资料.zip
- 1_江苏一男大学生脚踏两只船 ,.jpg.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



- 1
- 2
前往页