
A Multi-Sensor Fusion System for Moving Object Detection and
Tracking in Urban Driving Environments
Hyunggi Cho, Young-Woo Seo, B.V.K. Vijaya Kumar, and Ragunathan (Raj) Rajkumar
Abstract— A self-driving car, to be deployed in real-world
driving environments, must be capable of reliably detecting
and effectively tracking of nearby moving objects. This paper
presents our new, moving object detection and tracking system
that extends and improves our earlier system used for the 2007
DARPA Urban Challenge. We revised our earlier motion and
observation models for active sensors (i.e., radars and LIDARs)
and introduced a vision sensor. In the new system, the vision
module detects pedestrians, bicyclists, and vehicles to generate
corresponding vision targets. Our system utilizes this visual
recognition information to improve a tracking model selection,
data association, and movement classification of our earlier
system. Through the test using the data log of actual driving,
we demonstrate the improvement and performance gain of our
new tracking system.
I. INTRODUCTION
The 2005 DARPA Grand Challenge and the 2007 Urban
Challenge offered researchers with unique opportunities to
demonstrate the state of the art in the autonomous driving
technologies. These events were milestones in that they pro-
vided opportunities of reevaluating the status of the relevant
technologies and of regaining the public attention on self-
driving car development. Since then, the related technolo-
gies have been drastically advanced. Industry and academia
have reported notable achievements including: autonomous
driving more than 300,000 miles in daily driving contexts
[19], intercontinental autonomous driving [3], a self-driving
car with a stock-car appearance [20], and many more. Such
developments and demonstrations increased possibility of
self-driving cars in near future.
After the Urban Challenge, Carnegie Mellon University
started a new effort to advance the findings of the Urban
Challenge and developed a new autonomous vehicle [20]
to fill the gap between the experimental robotic vehicles
and consumer cars. Among these efforts, this paper details
our perception system, particularly, a new moving objects
detection and tracking system. The Urban Challenge was
held in a simplified, urban driving setup where restricted
vehicle interactions occurred and no pedestrians, bicyclists,
motorcyclists, traffic lights, GPS dropouts appeared. How-
ever, as shown in Figure 1, to be deployed in real-world
driving environments, autonomous driving vehicles must be
capable of safely interacting with nearby pedestrians and
vehicles. The prerequisite to safe interactions with nearby
objects is reliable detection and tracking of moving objects.
H. Cho, B.V.K Vijaya Kumar, and Ragunathan (Raj) Rajkumar are
with the ECE Department and Young-Woo Seo is with the Robotics
Institute, Carnegie Mellon University, 5000, Forbes Ave., Pittsburgh,
PA 15213, USA. {hyunggic, kumar, raj}@ece.cmu.edu,
young-woo.seo@ri.cmu.edu
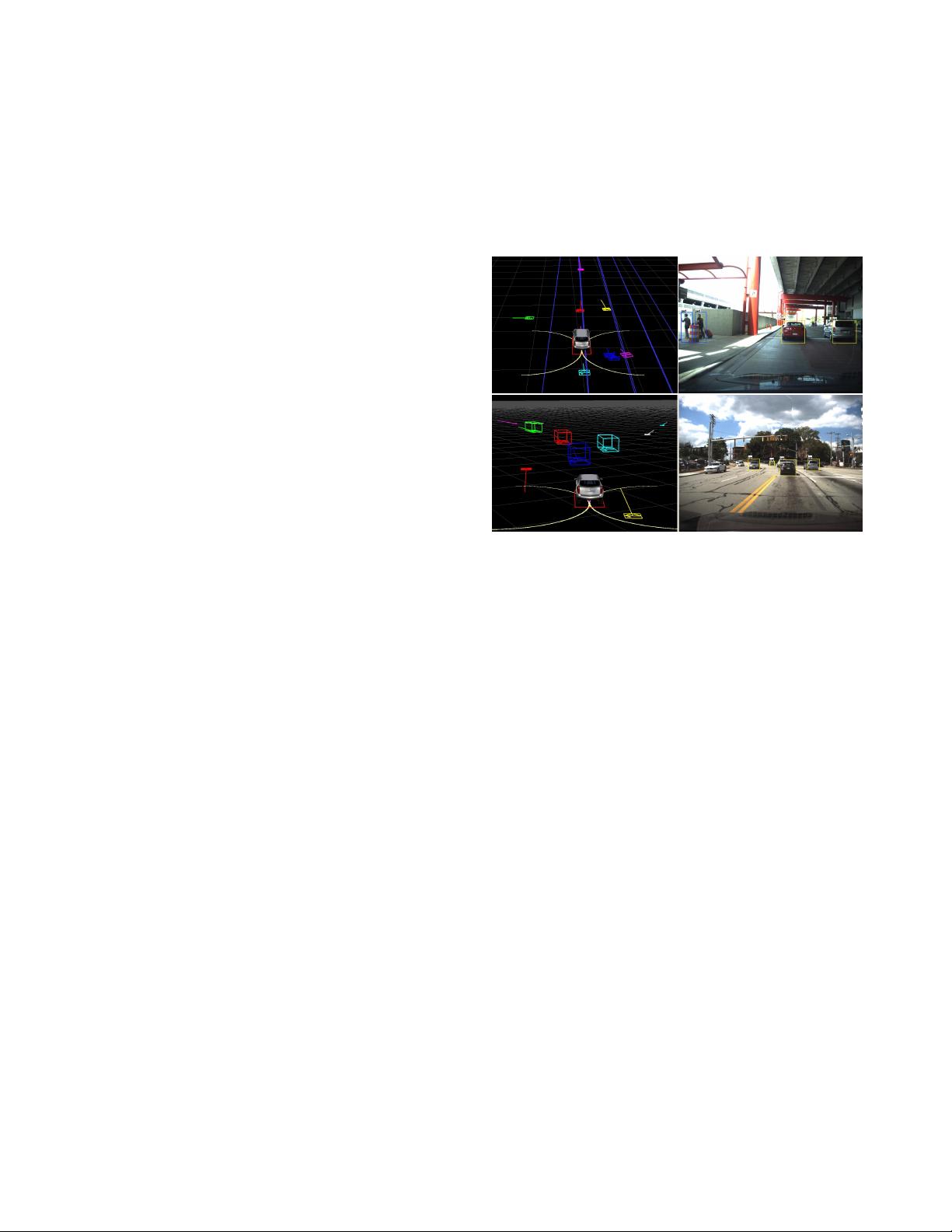
Fig. 1. Sample images show urban driving environments and screen-
captures of our tracking system’s results. The images in the first row
show detection and tracking results from an arriving area of Pittsburgh
international airport. The other two images in the second row show those
of an urban street.
To develop such a reliable perception capability for au-
tonomous urban driving, we redesigned our sensing system,
extended our earlier moving obstacle tracking system and
introduced new sensors in different modalities. Section III
and Section IV detail the configuration of multiple sensors in
different modalities. Knowledge of moving objects’ classes
(e.g., car, pedestrian, bicyclists, etc.) is greatly helpful to
reliably track them and derive a better inference about driving
contexts. To acquire such a knowledge, we exploit vision
sensors to identify the classes of moving objects and to en-
hance measurements from automotive-grade active sensors,
such as LIDARs and radars. Section V describes interactions
between our vision sensor based object detection system
and active sensor based object tracking system. Section VI
discusses the experimental results and the findings. Section
VII summarizes our work and discusses future work.
II. RELATED WORK
Detection and tracking of moving objects is a core task
in mobile robotics and as well as in the field of intelligent
vehicles. Due to such a critical role, this subject has been
extensively studied for the past decades. Since a compre-
hensive literature survey of this topic is beyond the scope
of this paper (we refer to [12], [16] for such surveys), here
we review only the earlier work on multi-sensor fusion for
2014 IEEE International Conference on Robotics & Automation (ICRA)
Hong Kong Convention and Exhibition Center
May 31 - June 7, 2014. Hong Kong, China
978-1-4799-3684-7/14/$31.00 ©2014 IEEE 1836

剩余7页未读,继续阅读
资源评论


TracelessLe
- 粉丝: 6w+
- 资源: 468









最新资源
- dataCollection-资源文件
- Java-Interview-Advanced-啊哦111
- Pear Admin Layui-资源文件
- 1615-1.6米写真机(数码印花机) sw14可编辑全套技术资料100%好用.zip
- FDG-A1∕D-56电子防盗保险柜sw16可编辑全套技术资料100%好用.zip
- A17038产品自动锁螺丝机sw17可编辑全套技术资料100%好用.zip
- 半自动U型上止焊接机(sw16可编辑+工程图)全套技术资料100%好用.zip
- 四工位高速塞棉机sw18全套技术资料100%好用.zip
- 消磁生产线sw17可编辑全套技术资料100%好用.zip
- 2.5mm铜箔焊线机sw19可编辑全套技术资料100%好用.zip
- 20T双级级水处理设备step全套技术资料100%好用.zip
- C语言编程实现不同类型的圣诞树
- HTML与JavaScript实现圣诞节飘雪效果代码详解
- 20米双层倍速链sw18可编辑全套技术资料100%好用.zip
- MC-160袋式除尘器sw18可编辑全套技术资料100%好用.zip
- 毕业设计-基于Flask健身论坛 详细文档+全部资料+高分项目.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


