

1
雷达通信实现 ...................................................... 2
实现思路: ...................................................... 2
部分实现过程及结果: ............................................ 3
雷达数据解析验证过程 .............................................. 5
数据报结构 ...................................................... 5
额外标头格式解读 ................................................ 6
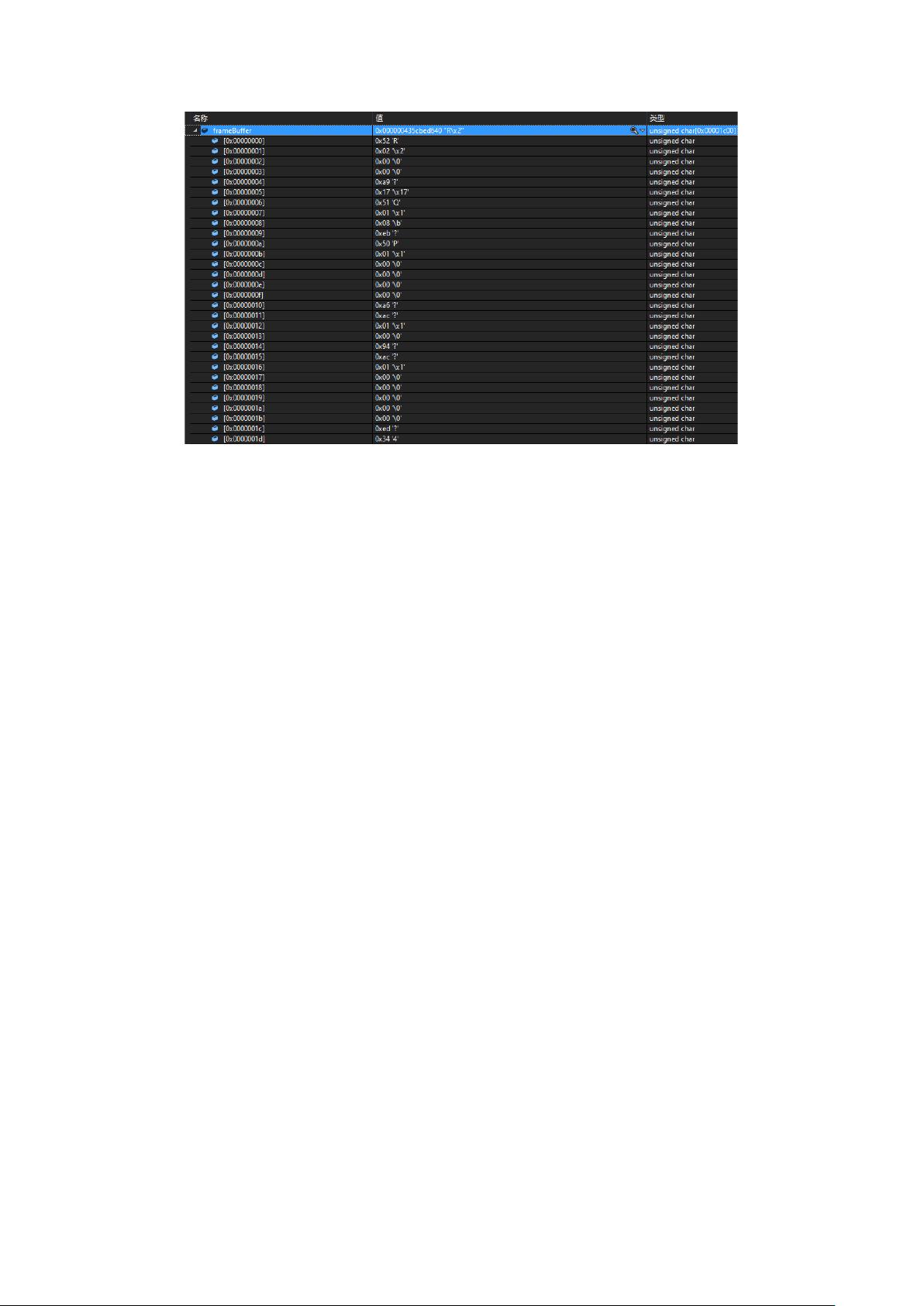
实测数据格式 .................................................... 7
数据解析说明书摘录翻译 ........................................... 14
可选数据块: ................................................... 14
header 主要包括的内容: ....................................... 14
对于可选数据块的解释 .......................................... 14
解释 UDP 数据流 ................................................. 16
配置和实际使用的角度范围 ....................................... 19
输出数据的格式 ................................................. 20
附表 ........................................................... 22


剩余23页未读,继续阅读
资源评论



Sanse_
- 粉丝: 764
- 资源: 5









最新资源
- 单相 三相光伏发电并网 离网simlink仿真(MPPT)或是大功率VSC 最大功率点追踪算法(MPPT)仿真模型, 有基于扰动观察法(P&O),恒压算法,电导增量法,变步长扰动 等最大功率点跟踪算法
- 手柄工具,Windows下手柄的映射工具
- 基于SMO滑模观测器的异步电机无传感器矢量控制,matlab,仿真模型
- 51jobduoyejson爬虫程序代码QZQ2.txt
- 51jobduoyehtml爬虫程序代码QZQ2.txt
- 51jobduoyehtml爬虫程序代码QZQ3.txt
- 51jobduoyejson爬虫程序代码QZQ1.txt
- 51jobduoyehtml爬虫程序代码QZQ.txt
- 51jobduoyehtml爬虫程序代码QZQ1.txt
- 51jobduoyejson爬虫程序代码QZQ.txt
- 三菱iQ-R系列PLC控制系统项目全套资料 系统才用三菱iQ-R系列PLC,采用R04CPU ,其中涉及到轴控制, MODBUS通讯,ETHERNET通讯,模拟量输入,数字量输入输出 PLC程序采用
- 非量化自回归模型在视频生成中的应用研究 - NOVA
- AI8051U第五节 - GPIO中断源代码
- JavaScript+jQuery实现俄罗斯方块
- 建模渲染end.3dm
- VMware虚拟机转换工具(转换至兼容VirtualBox的vmdx或VMWare低版本)
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


