
1
第二章 空间描述和变换
2.1 概述
2.2 描述:位置、姿态与位姿
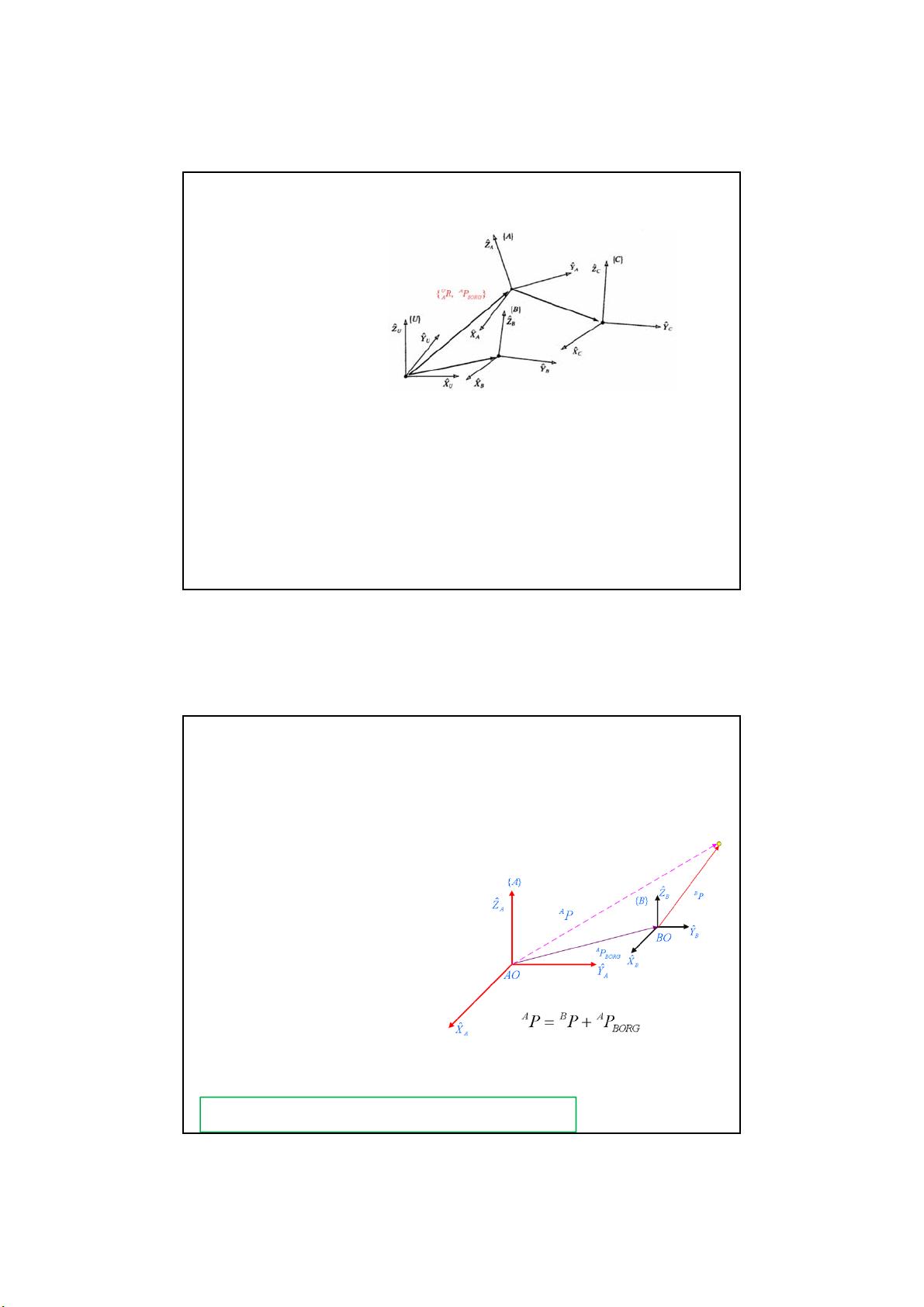
2.3 映射:从坐标系到坐标系的变换
2.4 算子:平移、旋转和变换
2.5 总结和说明
2.6 变换算法
2.7 变换方程
2.8 姿态的其他描述方法
2.9 自由矢量的变换
2.10 计算分析
1
2.1 概述
机器人操作:通过某种机构使零件和工具在空间中运动。这自
然就需要表达零件、工具以及机构本身的位置和姿态;
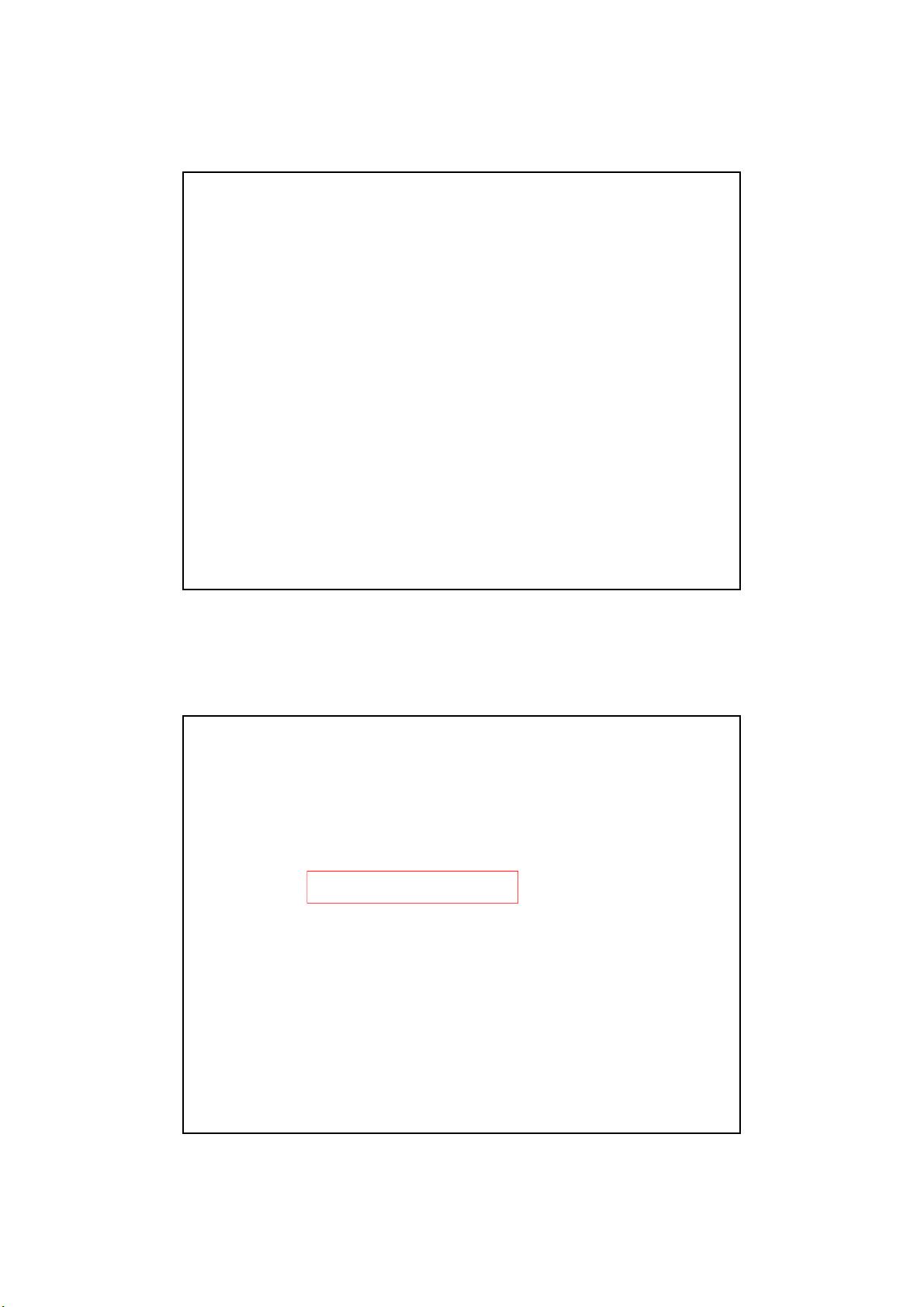
通过固定在零件、工具以及机构本身的坐标系来表达;坐标系
与刚体固定在一起,可以描述刚体位置和姿态。
世界坐标系:讨论上述坐标系时参照的坐标系,定义的位姿都
是参照世界坐标系或者由世界坐标系定义的笛卡尔坐标系。
位姿的描述也是表达线速度和角速度、力和力矩的基础。
刚体
2


剩余30页未读,继续阅读
资源评论


coder1qiang
- 粉丝: 1
- 资源: 8









最新资源
- 三菱电梯主板地址表参数 三菱电梯地址码, 778主板地址参数, 758电梯主板地址参数
- 藏区特产销售平台--论文-springboot毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- 洞见研报亚太卫星宽带(卫星宽带通信服务商,亚太卫星宽带通信(深圳)有限公司)创投信息
- 在线学籍管理系统--论文-springboot毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- “共享书角”图书借还管理系统--论文-springboot毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- 职称评审管理系统-springboot毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- 智慧党建系统设计与实现_1i659--论文-springboot毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- java学习平台--论文-springboot毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- 洞见研报云蝠智能(语音大数据及智能化客服解决方案供应商,南京星蝠科技有限公司)创投信息
- 基于labview的双音多频系统设计
- 基于Java的超市进销存系统--论文-springboot毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- 智慧学生校舍系统--论文-springboot毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- 光伏发电并网系统 matlab simulink整体仿真,波形如图,光伏板,MPPT控制boost,坐标变,锁相环,dq功率控制+解耦控制+电流内环电压外环,pwm调制,滤波器,此链接有2018a和
- 自习室预订系统-springboot毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- pytorch3D 为使用pytorch进行 3D 计算机视觉研究提供了高效、可重复使用的组件
- aarch64汇编指令集介绍
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


