
2019/12/27
1
第6章 操作臂动力学
6.1 概述
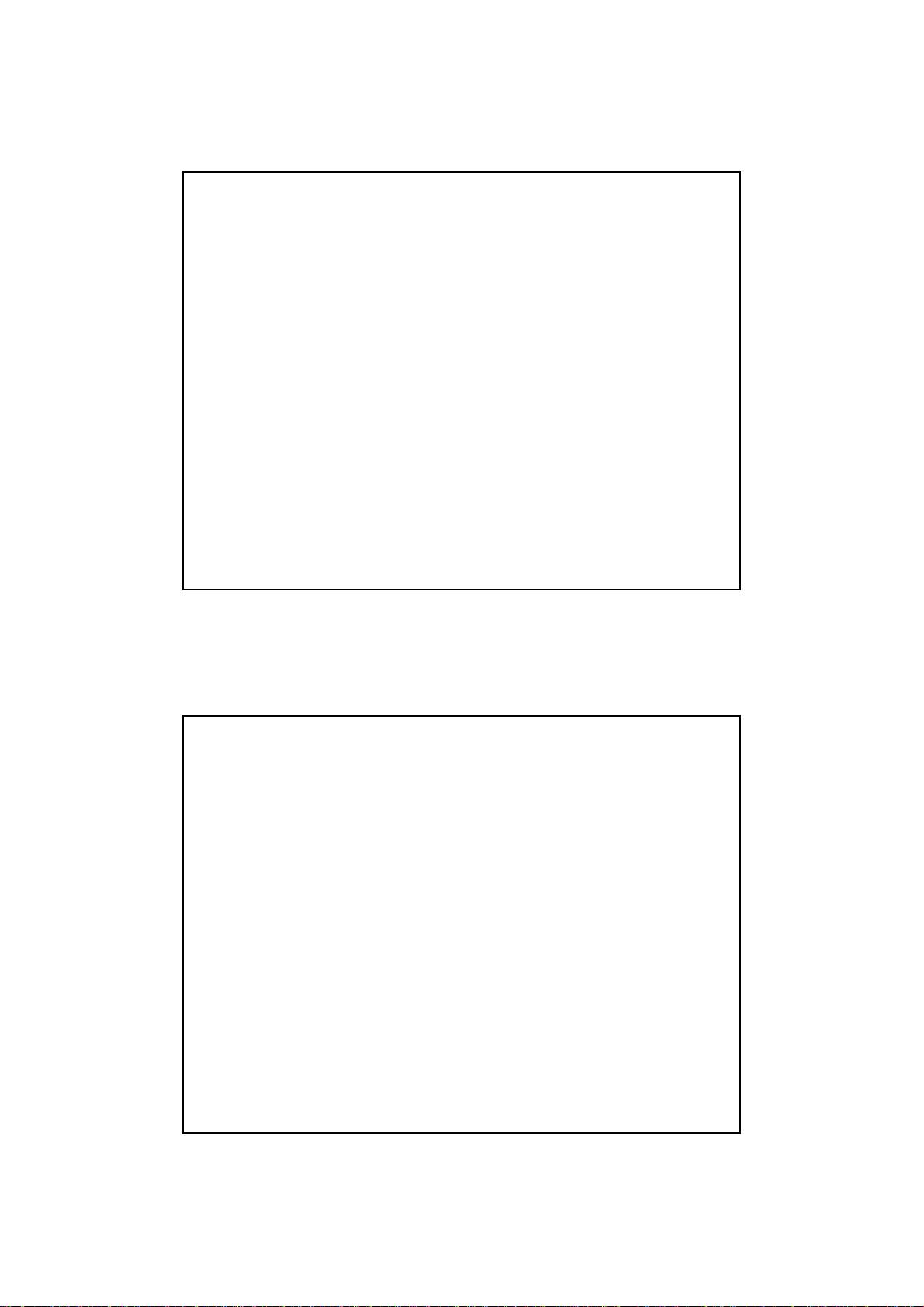
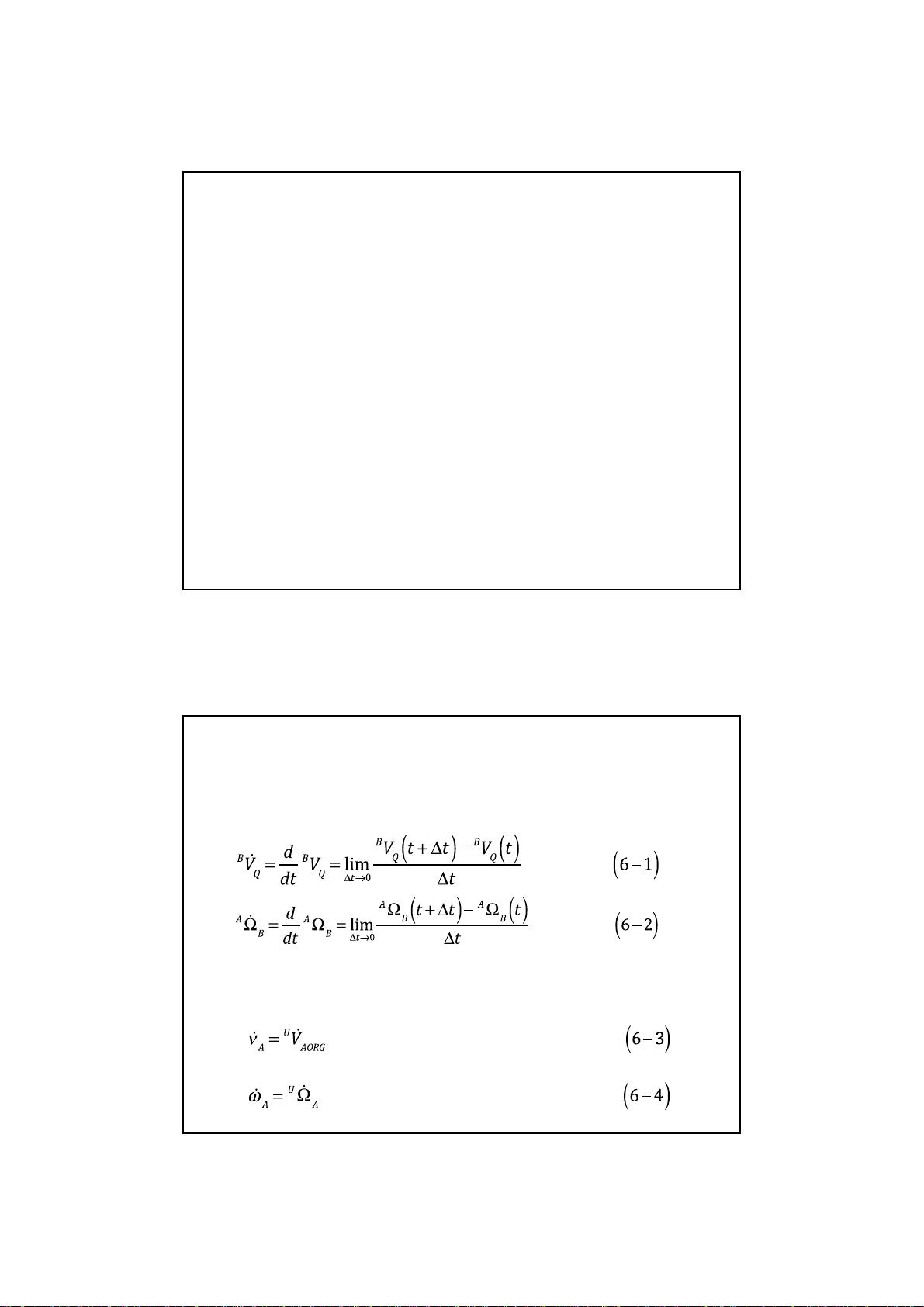
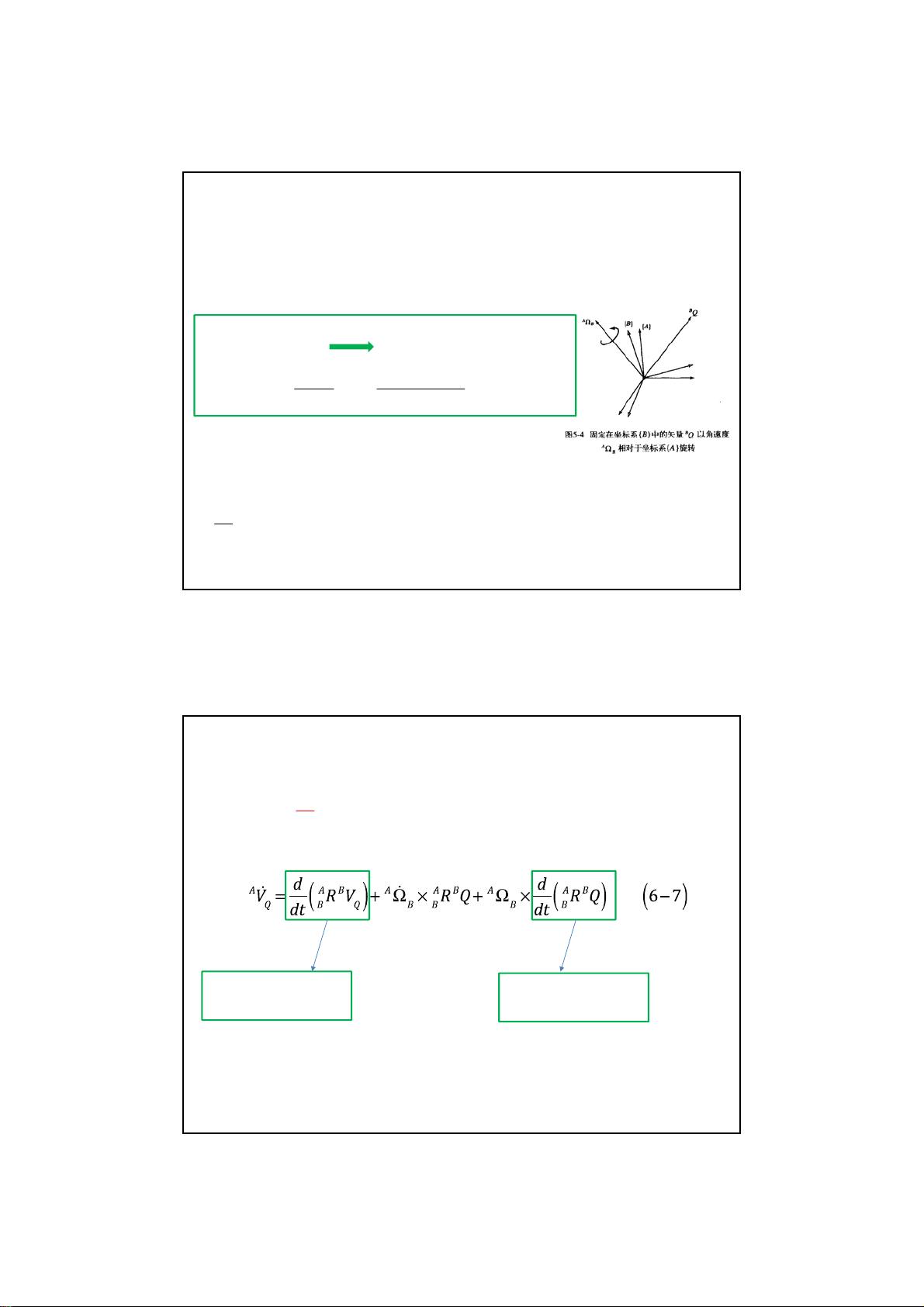
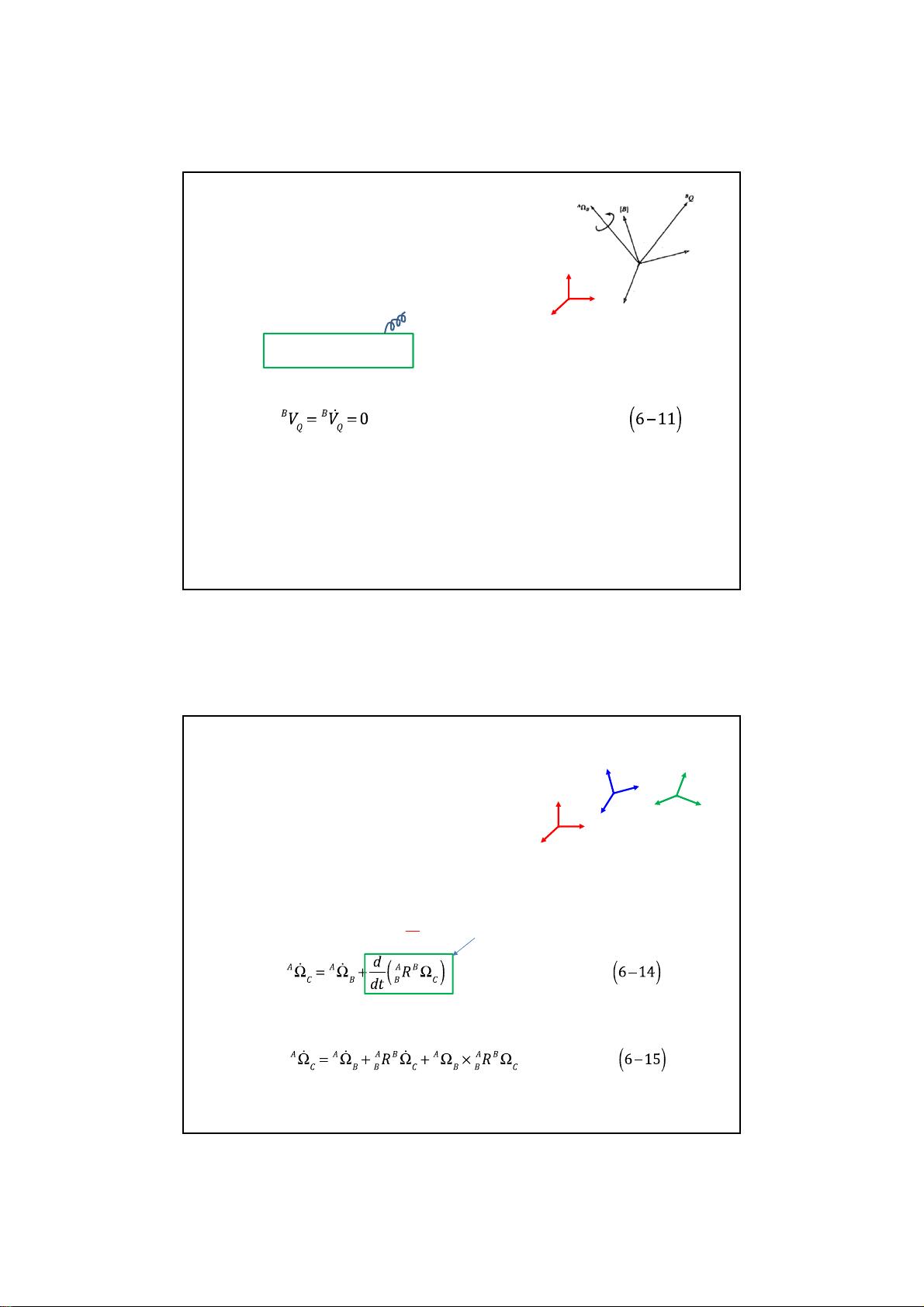
6.2 刚体的加速度
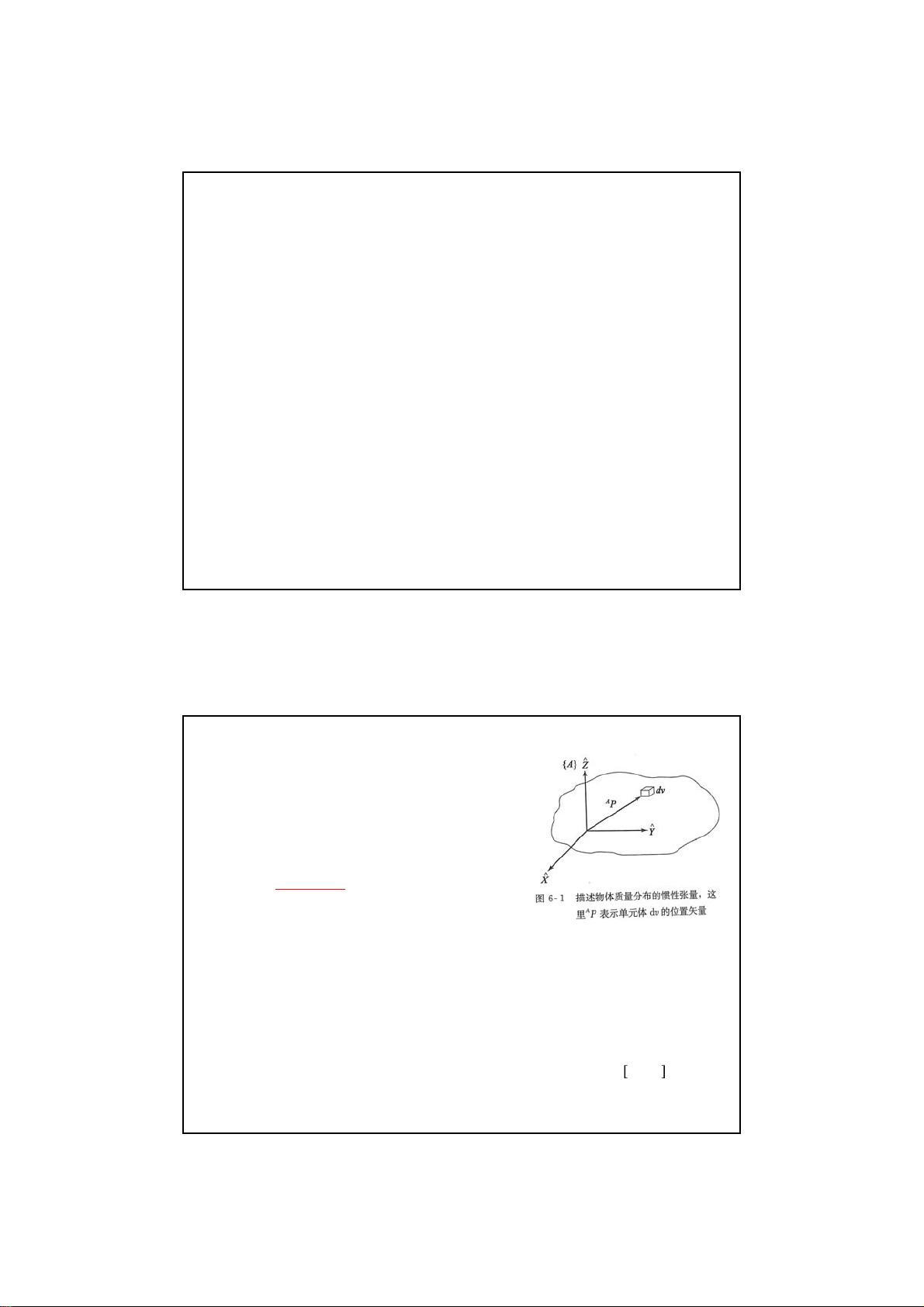
6.3 质量分布
6.4 牛顿方程和欧拉方程
6.5 牛顿-欧拉迭代动力学方程
6.6 迭代形式与封闭形式的动力学方程
6.7 封闭形式动力学方程应用举例
6.8 操作臂动力学方程的结构
6.9 操作臂动力学的拉格朗日公式
6.10 建立笛卡尔空间的规范化操作臂动力学方程
6.11 计及非刚体效应
6.12 动力学仿真
1
6.1 概述
到目前为止,我们只研究了操作臂的运动学。我们已研究了
静态位置、静态力和速度;但是,从未考虑引起运动所需的
力。在本章中,将考虑操作臂的运动方程—由驱动器施加的
力矩或施加在操作臂上的外力使操作臂运动。
2
研究目的:
1、合理地确定各驱动单元(以下称关节)的电机功率。2、
解决对伺服驱动系统的控制问题(力控制)
有待解决问题
(1)已知一个轨迹点Θ,Θ
和Θ
,希望求出期望的关节力矩矢
量𝜏。这个动力学公式对操作臂控制问题很有用。
(2)计算在施加一组关节力矩的情况下机构如何运动。也就
是,已知一个力矩矢量𝜏,计算出操作臂的运动Θ,Θ
和Θ
。
这对操作臂的仿真很有用。
剩余28页未读,继续阅读
资源评论


coder1qiang
- 粉丝: 1
- 资源: 8









最新资源
- 022基于多目标灰狼算法的冷热电联供型微网低碳经济调度 matlab代码.rar
- Java毕设项目:基于spring+mybatis+maven+mysql实现的在线教学平台管理系统分前后台【含源码+数据库】
- 零基础学习模拟电路,看懂电阻电容电感的工作原理
- 021基于两阶段鲁棒优化算法的微网多电源容量配置Matlab代码.rar
- 023电-气-热综合能源系统耦合调度、优化调度Matlab代码.rar
- 026-SVM用于分类时的参数优化,粒子群优化算法,用于优化核函数的c,g两个参数(SVM PSO) Matlab代码.rar
- 026SVM用于分类时的参数优化,粒子群优化算法,用于优化核函数的c,g两个参数(SVM PSO)Matlab代码.rar
- 027网架规划 Matlab代码.rar
- 029 基于YALMIP 的微网优化调度模型Matlab代码.rar
- 031基本算法智能微电网粒子群优化算法,微源:光伏、风机、发电机、储能等 matlab代码.rar
- 030 电负荷、热负荷数据Matlab代码.rar
- 032FuzzyMathematicalModel模糊数学模型 matlab代码.rar
- 033CellularAutomata元胞向量机 matlab代码.rar
- 034电力系统机组组合优化 不能运行.rar
- 037Matlab+YALMIP+CPLEX解决带储能的微电网优化调度问题Matlab代码.rar
- 035GoalProgramming(目标规划、多元分析与插值的相关例子) matlab代码.rar
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


