DATA-BASED MODELING OF ENGINE THROTTLE VALVE DYNAMICS
TABLE OF CONTENTS
Data-BASED Modeling of Engine Throttle Valve Dynamics ................................................................................... 1
Introduction To Problem ................................................................................................................................................. 2
Data Based Modeling Approach .................................................................................................................................... 2
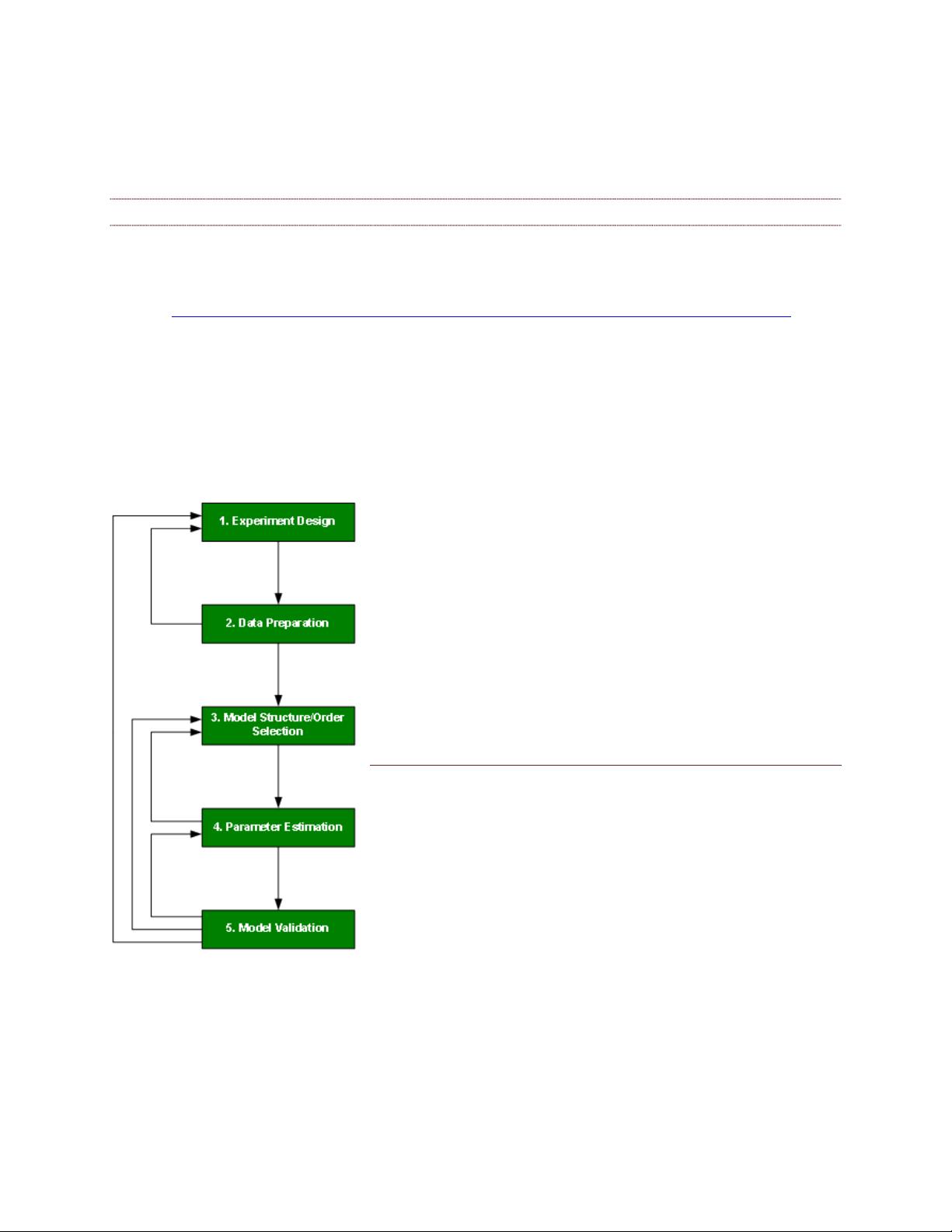
Process of Data Based Model Creation .................................................................................................................. 4
Black Box Modeling Approach ...................................................................................................................................... 4
Understanding Nonlinear Model Structures ...................................................................................................... 5
Estimating Models Using System Identification Tool ..................................................................................... 7
Summarizing Black Box Modeling Approach ................................................................................................... 29
Grey box Modeling Approach ...................................................................................................................................... 30
Concluding Remarks on Modeling ........................................................................................................................ 32
Viewing Model Parameters........................................................................................................................................... 32
Parameters of a Nonlinear ARX Model ................................................................................................................ 33
Parameters of a Hammerstein-Wiener Model ................................................................................................. 34
Parameters of A Nonlinear Grey Box Model ..................................................................................................... 36
Using Models for Simulation and Analysis ............................................................................................................. 36
Simulating in MATLAB ............................................................................................................................................... 36
Using Models in Simulink ......................................................................................................................................... 37
Code Generation ........................................................................................................................................................... 39
Final Notes ........................................................................................................................................................................... 40
Choice of sample time ................................................................................................................................................ 40
How to choose initial conditions (“initial states”) for simulation............................................................ 41
References ........................................................................................................................................................................... 41
This document describes nonlinear modeling of the engine throttle dynamics using data centric
approaches available in System Identification Toolbox™ . Two approaches are described:
1. Black box modeling: case where you cannot derive the exact mathematical representation of
the system from physical considerations; the form of the model as well as the values of its
coefficients is extracted from data.
2. Grey-box modeling: the equations of motion relating the input and output variables are
known, but the values of various physical constants in the equations are unknown; the data
is then used to find the values of those unknowns only.