
www.yahboom.com
基础硬件控制课程---驱动舵机
1. 学习目标
本次课程我们主要学习如何控制小车的舵机。
2. 实验原理
对于 Raspbot 小车的驱动板上我们集成了 4 路舵机引脚接口,位于如下图所示的
地方,分别是 S1~S4。和电机一样,舵机的驱动芯片 TB6612 没有直接连接到树
莓派引脚,而是树莓派通过 IIC 与 STM8 单片机通讯,由 STM8 单片机驱动 TB6612
芯片,从而驱动舵机。
舵机的接线:
舵机棕色的线需要接入扩展板上标有“-”的引脚上。
舵机红色的线需要接入扩展板上标有“+”的引脚上。
舵机橙色的线需要接入扩展板上标有“IO”的引脚上。
Raspbot 小车摄像头云台具有两个舵机,分别接在 S1,S2 接口上。下面的舵机接
S1,上面的舵机接 S2。
3. 编码方式
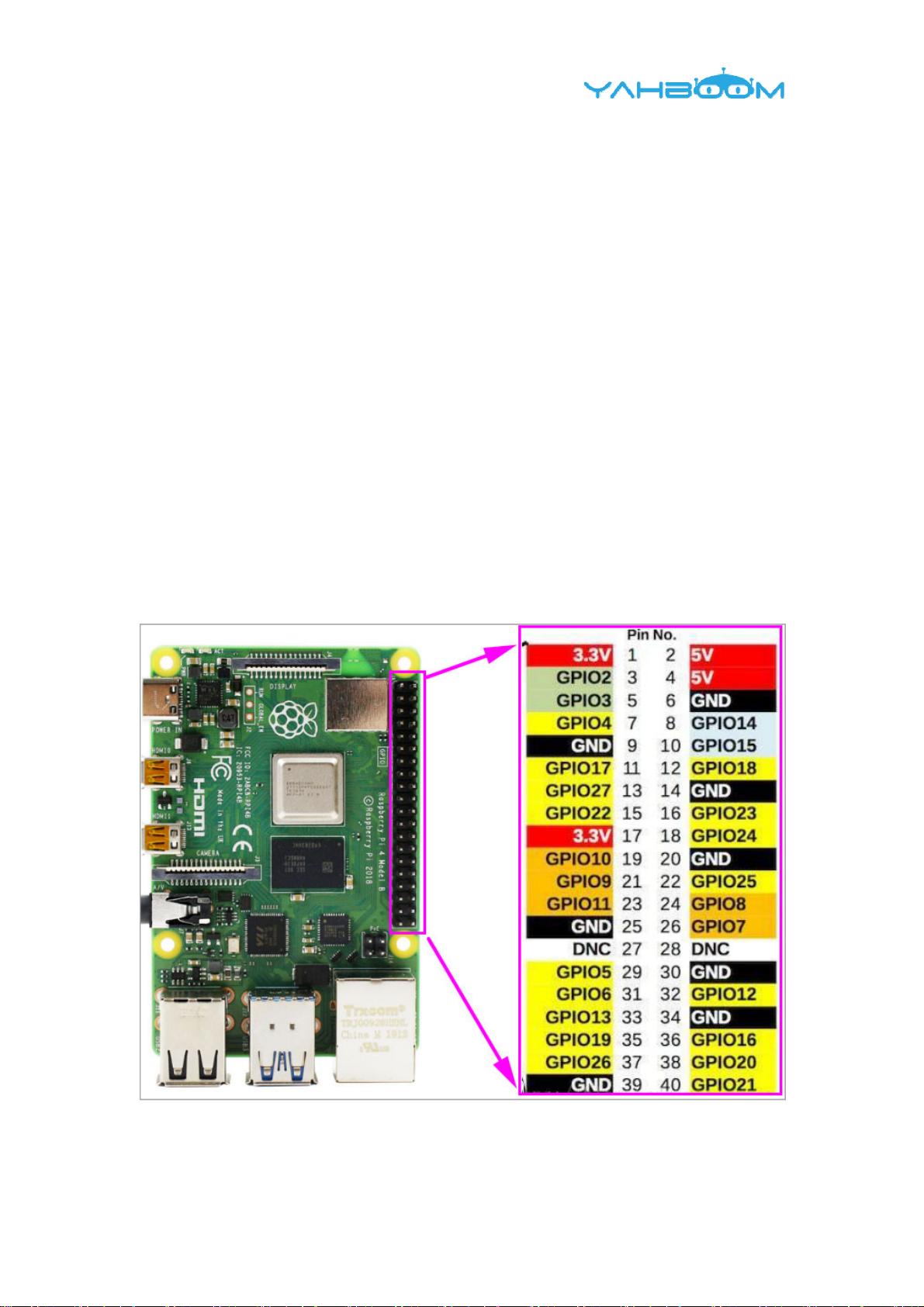
STM8 与树莓派通讯采用的是树莓派主板上的 SDA.1, SCL.1。
树莓派引脚对照表如下图所示。
资源评论













