carsim-help
需积分: 0 194 浏览量
2022-12-26
17:03:21
上传
评论
收藏 22.23MB PDF 举报


Mechanical Simulation VehicleSim Products
755 Phoenix Drive, Ann Arbor MI, 48108, USA
Phone: 734 668-2930 • Fax: 734 668-2877 • Email: info@carsim.com carsim.com
1 / 66 December 2018
Paths and Road Surfaces
Reference Paths ...................................................................................................... 2
ID Numbers...................................................................................................... 3
Coordinate Transformations ............................................................................ 4
The LTARG Configurable Function ................................................................ 5
Using VS Reference Paths ............................................................................... 7
The Path Segment Builder Screen ................................................................... 9
The Path/Road Segment Builder (Legacy) Screen ........................................ 15
Path and Road Tables with X-Y Coordinates ................................................ 17
Working with GPS Data ................................................................................ 22
Smoothing Path Data ..................................................................................... 23
Road Surface Physical Properties ......................................................................... 24
Using Road Surfaces ...................................................................................... 25
The Road: 3D Surface Screen ........................................................................ 26
Road Elevation Screens ................................................................................. 33
Road Friction Screens .................................................................................... 39
The Paths and Roads Segment Builder (Legacy) Screen ............................... 39
Path and Road Tables with X-Y Coordinates ................................................ 44
Connecting Road Surfaces ................................................................................... 46
Points of Interest for Boundaries ................................................................... 47
Boundary Definitions ..................................................................................... 47
The Road Boundaries Screen ......................................................................... 49
Guidelines for Setting Road Boundaries ........................................................ 54
Initial Vehicle Location and Orientation .............................................................. 58
Horizontal Position and Yaw Angle .............................................................. 58
Vertical Position and Orientation of the Lead Sprung Mass ......................... 59
Initial Road Surface ....................................................................................... 60
Roughness Profiles ............................................................................................... 61
Profile Measurement ...................................................................................... 61
The Surface Roughness Profiles Screen ........................................................ 62
Vehicle-Road Axis System .................................................................................. 65
References ............................................................................................................ 66
BikeSim, CarSim, and TruckSim include 3D multibody models that simulate vehicle dynamics
under driver/rider control on a 3D ground surface. The equations of motion for the physics math
models are formulated using global X-Y-Z coordinates; all positions, velocities, and accelerations
are available in global coordinates, and sometimes, local body-fixed coordinate systems.
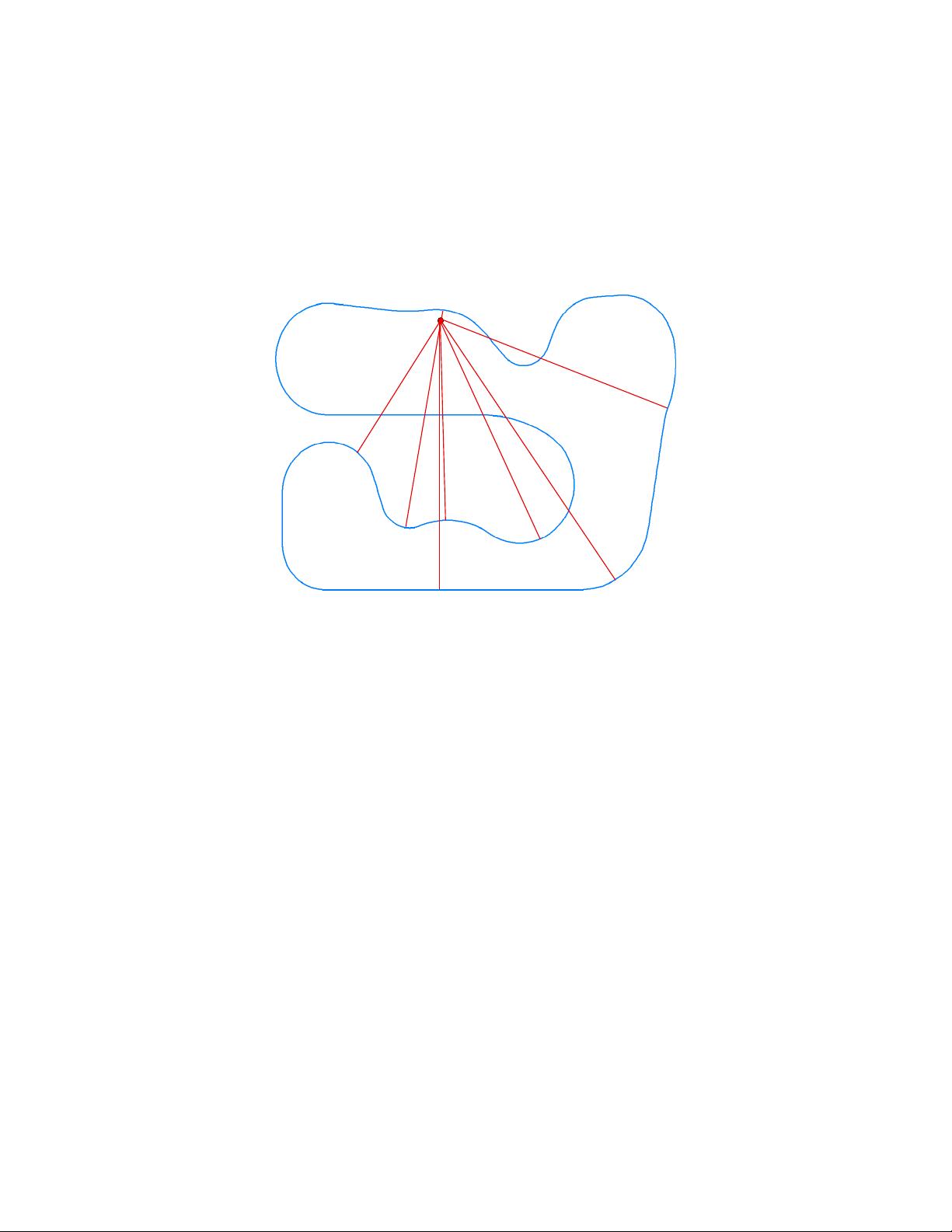
In most simulations, the vehicle is controlled to follow paths of interest, and tires only contact the
ground near those paths of interest. In the VehicleSim math model, the concept of a road surface
is mainly a representation of the ground properties (geometry and friction) in a form that is well-
defined where the vehicle tires are likely to travel, and sparse or nonexistent where the tires are
unlikely to be. To do this, VS Roads represent the road surface using a coordinate system based on



剩余65页未读,继续阅读
资源评论


CScodemini
- 粉丝: 174
- 资源: 1









最新资源
- 基于python实现的,利用树莓派的GPIO端口控制输出汉字到点阵LED屏上
- 基于Solidworks、Matlab Simulink、COMSOL的倒立摆协同仿真资料
- 单片机电子设计项目参考资料基于PLL信号发生器的设计论文资料(仅论文)
- 16957123401091706567347925721090.zip
- 汇编语言实现对加密的字符串进行解密
- 基于WebGIS的地图发布系统设计与实现
- Java基于遗传算法的自动排课系统源码.zip
- 单片机电子设计项目参考资料基于IGBT的变频电源设计论文资料(仅论文)
- 单片机电子设计项目参考资料基于GSM短信模块的家庭防盗报警系统论文资料(仅论文)
- tensorflow-1.5.0-cp27-cp27m-win-amd64.whl
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


