重 庆 大 学
学 生 实 验 报 告
实验课程名称 智能网联汽车信息安全
开课实验室 C408
学 院 工程师学院 年级 2020 专业班 汽车 2 班
学 生 姓 名 罗金琦 学 号 E2020185
开 课 时 间 2023 至 2024 学年第 2 学期
总 成 绩
教师签名
卓越工程师学院
《智能网联汽车信息安全》实验报告
开课实验室: 年 月 日
学院
工程师学院
年级、专业、班
2020 级汽车 2
班
姓名
罗金琦
成绩
课程
名称
智能网联汽车信息安全
实验项目
名 称
安全通信协议
指导教师
夏晓峰
教
师
评
语
教师签名:
年 月 日
1. 实验目的
1. 了解安全套接层(SSL)协议的基本原理;
(SSL,即安全套接层(Secure Socket Layer),是 Netscape 公司所提出的安全保密协议,运行
在 TCP/IP 层之上、应用层之下,为应用程序提供加密数据通道。它使用数字签名确保完整性,
并使用加密确保私密性,以实现客户端和服务器之间的安全通讯。
SSL 协议工作流程图
1. 初始连接:
o 客户端向服务器发起连接请求。
2. SSL 握手开始:
o 客户端发送客户端的 SSL 版本、支持的加密算法列表等给服务器。
o 服务器选择一种加密算法,发送服务器证书给客户端,并请求客户端证书
(可选)。
3. 服务器身份验证:
o 客户端验证服务器证书的有效性,确认服务器的身份。
4. 密钥交换:
o 如果需要,客户端和服务器进行公钥交换,生成会话密钥。
5. 加密通信建立:
o 客户端和服务器使用协商好的加密算法和会话密钥进行对称加密通信。
6. 数据传输:
o ++++++
7. 连接关闭:
o 当数据传输完成,客户端和服务器安全地关闭 SSL 连接。
2. 了解 ROS 服务(service)机制的用法;
(ROS 服务机制提供了一种同步、可靠的通信方式,适用于需要请求和响应的场景。通
过合理定义服务和编写服务端与客户端节点,可以实现跨进程的函数调用和数据交互。)
3. 了解创建 ROS 自定义服务数据的方法;
4. 在 ROS 中构建简单的安全通信。
ROS 下最核心的几种核心通讯机制:
话题通讯机制 topic
服务通讯机制 service
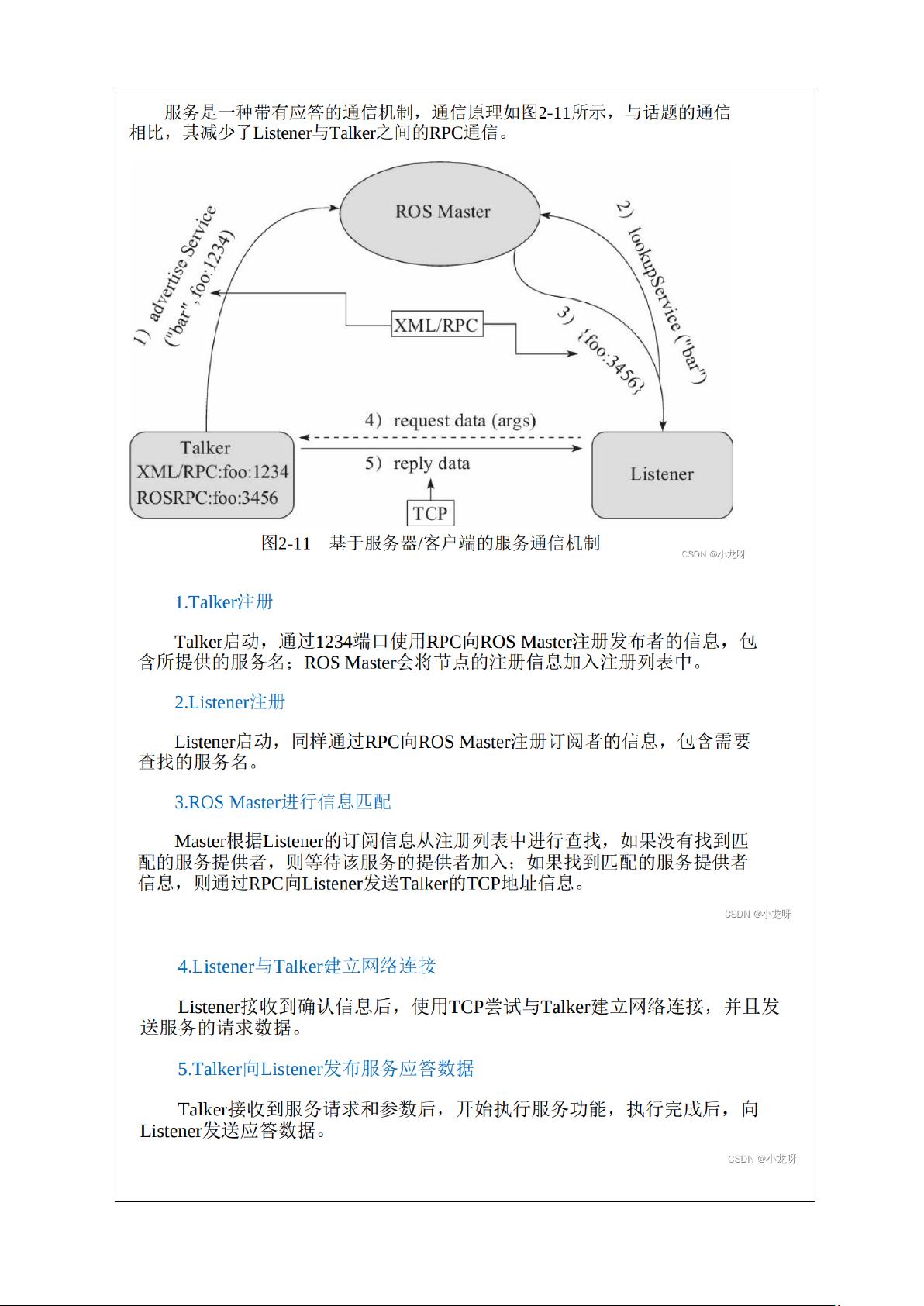
当 ROS 程序启动时,第一步首先启动 master(roscore),然后节点管理器处理依次启动 node。
Ros 的 topic 通信,
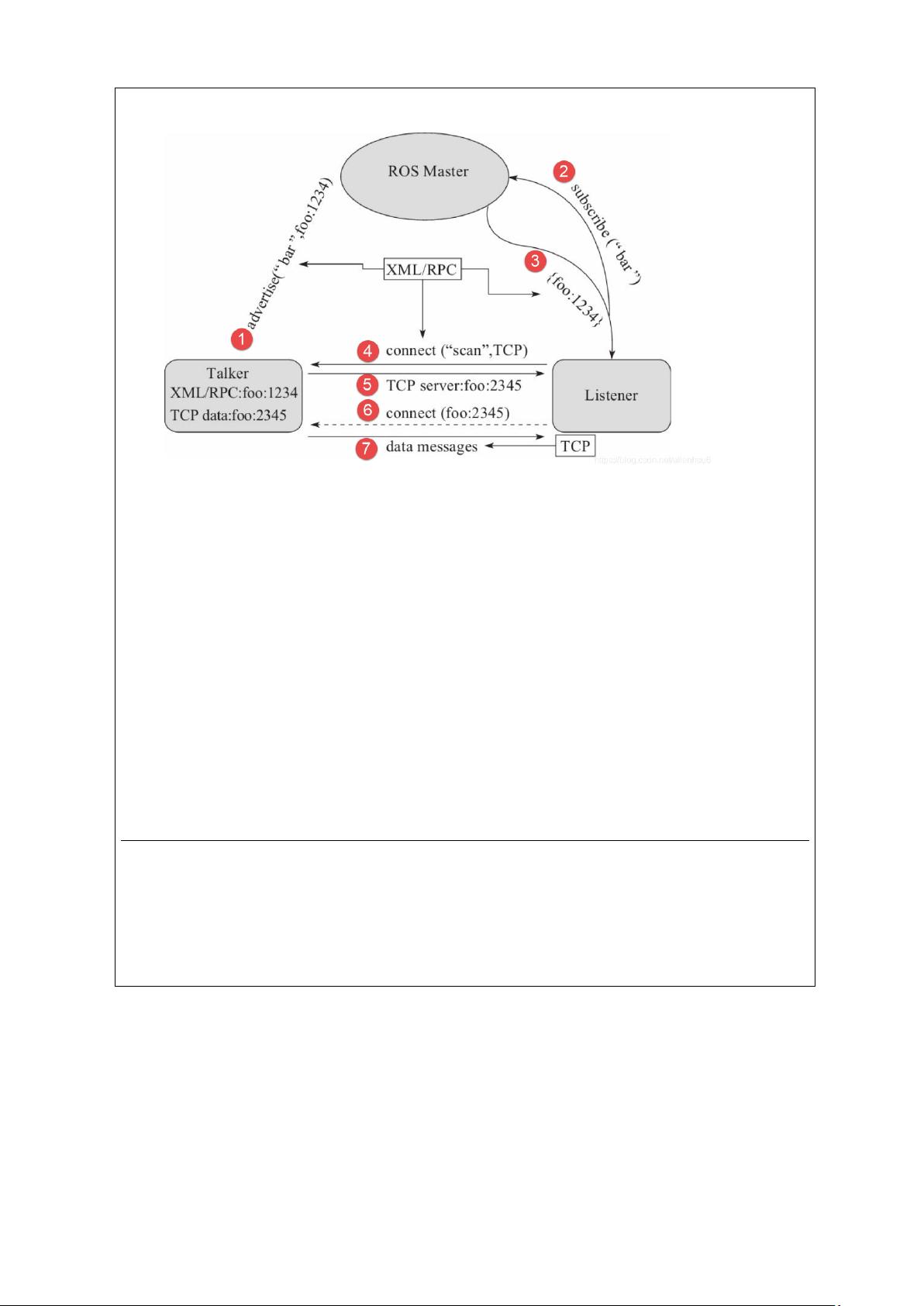
两个 node 之间建立数据通讯需要经过上图所示的 7 步骤:
1. talker 注册:通过 1234 端口想 master 注册信息,其中包括话题名
2. listener 注册
3. ros master 信息匹配:通过 listener 的订阅信息,在注册列表中查找,没有找到发布者,就等
待发布者的加入;找到的话,就通过 RPC 向 listener 发布 talker 的 RPC 地址信息。
4. listener 发送连接请求:根据 master 给的地址,通过 RPC 向 talker 发送连接请求、话题名、
消息类型、通讯协议
5. talker 确认连接请求:通过 RPC 向 listener 确认连接信息,其中包含 TCP 地址
6. listener 尝试与 talker 建立网络连接
7. talker 向 listener 发布数据
前五个步骤都是 RPC 通信协议,最后才用到 TCP
master 在节点建立连接的过程中起到关键作用,但是不参与节点间最终的数据传输
service 服务通讯机制是一种双向同步数据传输模式。基于客户端/服务器模型,两部分通信数据类
型:一个用于请求,一个用于应答,类似 web 服务器。
ROS 中只允许一个节点提供指定命名的服务。